
Az tisztán látszik, hogy egyre nagyobb szerep jut majd a mesterséges intelligenciának az önvezető autók kapcsán. De mi történik akkor, ha nem áll rendelkezésre elegendő mennyiségű adat a gépi tanuláshoz? Mérnökeink erre kerestek megoldást.
Átalakul a közlekedés
Az emberi beavatkozást nem igénylő önvezető autók megjelenése forradalmi változásokat hozhat életünkbe: ha elterjednek az ilyen járművek, teljesen átalakulhat a közlekedés. Képzeljük csak el, hogy elég lesz okostelefonunk segítségével autót hívni otthonunk elé, majd beszállni a hajszálpontosan kért időpontra rendelt járműbe. Ezt követően pedig az utazás során nem kell a forgalmat figyelnünk, menet közben akár dolgozhatunk, filmet nézhetünk vagy olvasgathatunk. Ráadásul nem kell megvásárolnunk az autót, a fenntartási költségek mellett pedig egy sor vesződségtől is megkímél minket az, hogy elég egy-egy útra kibérelnünk a járművet. Nem kell parkolóhelyet keresnünk és persze fizetnünk a parkolásért. Ráadásul még a közlekedési dugók is enyhülhetnek.

Az önvezető rendszerek egyik legnagyobb előnye az enyhülő dugókban rejlik majd.
A Bosch fejlesztéseinek köszönhetően egyre közelebb kerülünk ahhoz, hogy mindez a hétköznapi valóság része legyen és szinte bárki számára elérhető legyen az önvezető autózás. A szakértők szerint, ha elterjednek az ilyen járművek, egy átlagos városi út alig kerül majd többe, mint pár buszjegy. Egyelőre azonban még csak néhány nagyvárosban tesztelik az ilyen rendszereket. A cél az, hogy mindenhol, minden körülmények között biztonságosan működjenek a járművek, ne zavarja meg azokat egy havas útszakasz, eső, vagy kopott, hiányzó útburkolati jel, esetleg túl kevés rendelkezésre álló adat.
Sok kis lépés

Bár emberi beavatkozást nem igénylő autókkal „élesben” az átlagember még nem találkozhat az utakon, vállalatunk már számos olyan fejlesztést dobott piacra, amelyek már most is megkönnyítik, biztonságosabbá teszik a vezetést. Ilyenek a lidar-, radar- és kamerarendszerek, fedélzeti számítógépek, táblafelismerő rendszerek, de említhetjük az adaptív sebességszabályzót (ACC) és a sávtartó asszisztenst is. Az önvezető autózást tehát több lépéssel érhetjük el és az első lépéseket a vezetéstámogató rendszerek bevezetésével már megtettük.
Az egyik következő ilyen lépés az önvezető autózás felé a már említett adaptív sebességszabályzó szélesebb körű elterjesztése (ACC), ami már egyetlen új generációs mono kamerával is megvalósítható. Bár a radarokkal szemben a távolság és a relatív sebesség nem mérhető közvetlenül a nyers videóadatokból, a mono kamerák ezen hiányosságainak kompenzálására intelligens algoritmusokat fejlesztettek ki mérnökeink. A mesterséges intelligencián alapuló algoritmusok használatával a kamera fontos adatokat képes szolgáltatni az automatizált oldalirányú (kormányzás) és hosszirányú (fékezés, gyorsítás) vezérléshez, és képes az úton tartani a járművet, úgy, hogy az reagálni is tud a forgalom többi szereplőjére. Ha pedig a kamerarendszer mellett radart is használunk, még kényelmesebb és biztonságosabb lesz a vezetés.
Mihez kezdjünk egy kamionnal?
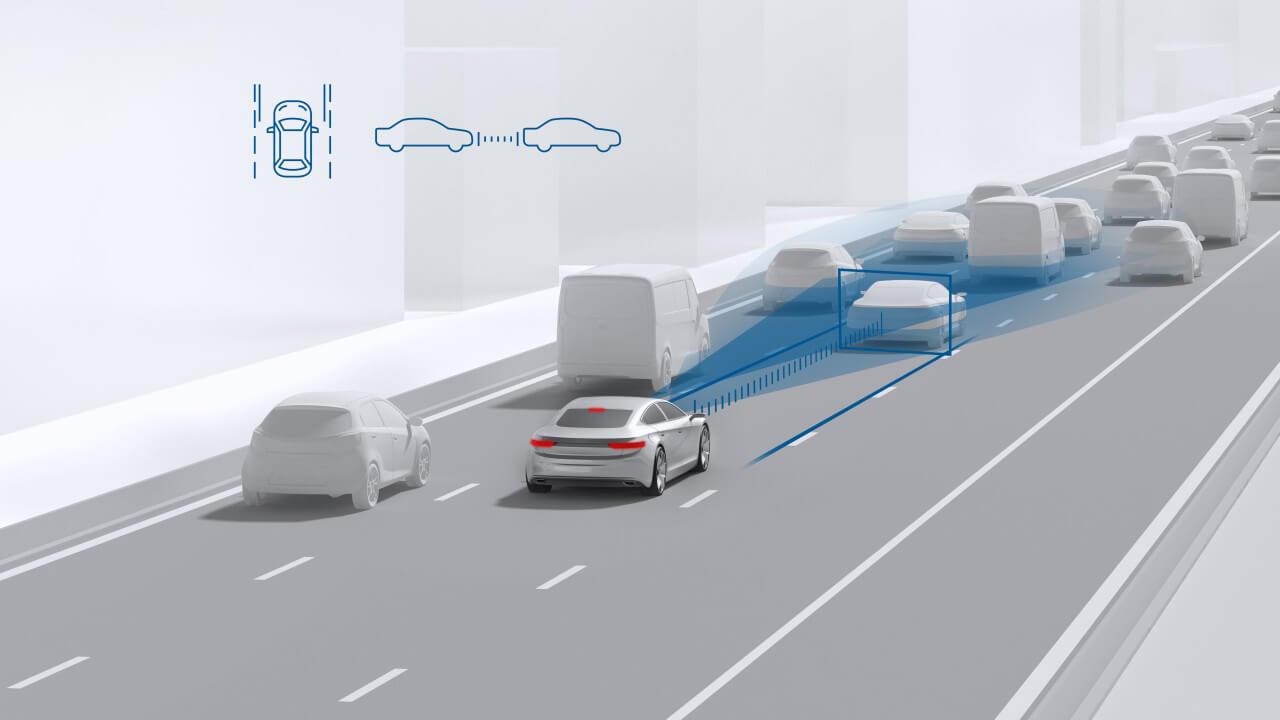
Az adaptív sebességszabályozás az egyik legfontosabb tényező az önvezető technológiák kapcsán.
Komoly kihívást jelentett a mérnököknek, hogyan ismerjen fel egy önvezető rendszer bizonyos közlekedési szituációkat. Az egyik ilyen potenciálisan veszélyes helyzet, amikor autópályán egy tehergépjármű előzésbe kezd, úgy, hogy mögötte, nagyobb sebességgel érkezik egy ACC-vel felszerelt autó. Egy kamion esetében ugyanis, amikor a jármű eleje már abban a sávban halad, amelyben az önvezető autó is, a hátsó része még a másik sávban van. Ez pedig könnyen „megbolondíthatja” az ACC rendszereket, hiszen csak akkor kezdenek fékezni, amikor a jármű egésze abban a sávban halad, amelyikben az önvezető jármű is. Vagyis egy ilyen helyzetben valós veszély, hogy a rendszer késve kezd el fékezni. Mérnökeink ezért most azon dolgoznak, hogy mindez „élesben” ne forduljon elő, a fentiekben leírt sávváltásokat is megfelelően értelmezze a rendszer és időben reagáljon.
És mi történik, ha kevés az adat?

Az önvezető járműveknek a legváratlanabb helyzeteket is jól kell kezelnie.
Ahhoz, hogy az önvezető autózás megvalósuljon, mesterséges intelligenciával működő rendszerekre van szükség. Ezek az eszközök viszont csak akkor tudnak hatékonyan működni – vagyis gyorsan tanulni – ha nagy mennyiségű adat áll a rendelkezésükre. A sávváltás azonban könnyen lehet kritikus szituáció, nehéz előre betáplálni olyan „necces” helyzeteket, amelyekből tanulhat a jármű: nem mindegy, hogy mekkora a forgalom, a többi jármű milyen sebességgel halad, vagyis minden sávváltás egyedi szituációt eredményezhet. A kis mennyiségű adat pedig mindig gondot okoz a gép tanulás területén, mivel a hálózatok az előre betáplált forgatókönyvekre támaszkodnak.
Alapos elemzés után ezért három különböző hálózati architektúrán dolgoznak a Bosch szakemberei (egy hosszú-rövid távú memória architektúrán és két konvolúciós neurális hálózati architektúrán). Ezenkívül különböző megközelítésekkel kísérleteznek a kis adatkészletek problémájának megoldása érdekében. A klasszikus adatnövelési technikák mellett, mint például zaj hozzáadása, vagy a bemeneti adatok keverése, egy szimulációs keretrendszert, illetve úgynevezett Variational Autoencoder eszközt (VAE) is alkalmaznak, mindkettőt szintetikus adatok előállításához a valós, de kis mennyiségű bemeneti adatok alapján.
Látens tér

Ezzel a módszerrel eddig egyáltalán nem tanítottak szakembereink önvezető autókat, de úgy tűnik hatásos és szükség is lesz rá.
A VAE nagyon hasznosnak bizonyult, mert nagy mennyiségű új információt képes előállítani, ha egy kis adatkészlet megtanult absztrakcióját adjuk meg számára. A program először egy kódoló lépést végez el, majd következik egy dekóder lépés. Ezt a kompakt ábrázolást látens térnek nevezzük, amely a bemenő adatok erősen összesített, absztrakt ábrázolásaként értelmezhető. Ebben a látens térben véletlenszerű zajt adnak hozzá az adatokhoz, amely után a dekóder lépés megsokszorozza a bemeneti adatokat. Ez a megközelítés nagyon hasonlít a számítógéppel előállított mély álomképekhez, de képek helyett összesített idősoros adatokra alkalmazzák. A hozzáadott zaj alapján a VAE nagy mennyiségű további új adatot „álmodik”, amelyek felhasználhatók a tanuláshoz.
Ez a laikusoknak kissé utópisztikusnak tűnő módszer az eddigi tapasztalatok alapján jól működik. Ezzel együtt a mérnökök előtt még sok munka áll, hiszen az adatokat és a működés egészét értékelni és finomítani kell. Az irány viszont abból a szempontból mindenképp jó, hogy egy viszonylag olcsó alkatrész segítségével komoly funkciókat tudunk biztosítani, ami olcsóbbá és ezáltal elérhetőbbé teheti magát az egész technológiát.



