Évek óta megrendezi a Budapesti Műszaki és Gazdaságtudományi Egyetem Villamosmérnöki és Informatikai Kara (BME VIK) a robotika csapatversenyét, amelyen mesterképzéses hallgatók vehetnek részt. A robotok tulajdonképpen kis méretű önvezető (autonóm) modellautókat takarnak. A megmérettetést idén a Kis Mihály Bence és Varga Dániel Jonatán nevével fémjelzett Sufnituning Kft. nevű csapat nyerte, Matesz nevű robotautójával.
Misi egyetemi tanulmányai mellett a Bosch gyakornokprogramjának is tagja. Idén már másodszor vett részt a versenyen, így volt elképzelése arról, hogyan érhetnek el jó eredményt. Ő és csapattársa is indult már egy másik alakulat színeiben tavaly, idén pedig összeálltak és nyerő csapatot alkottak.
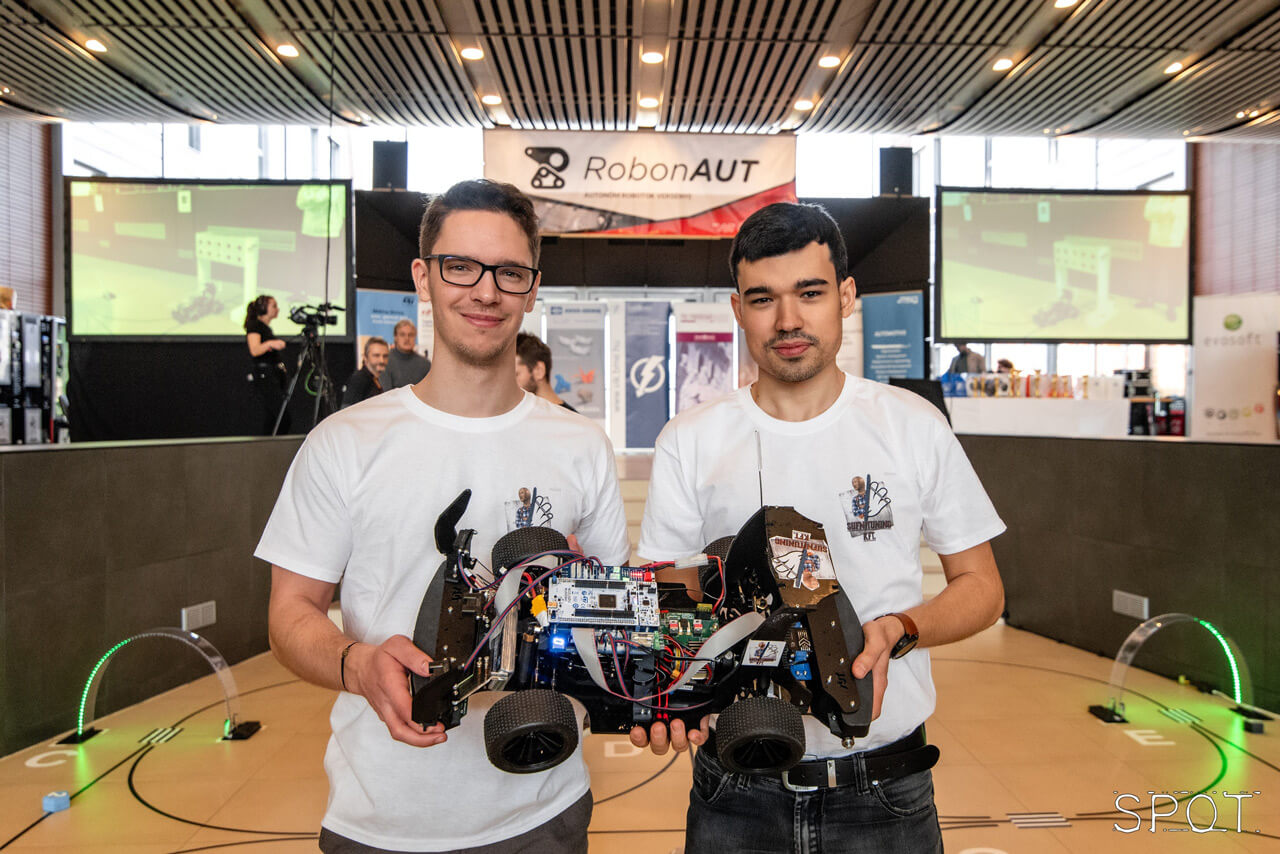
Kis Mihály Bence és Varga Dániel Jonatán két fős csapata idén megállíthatatlannak bizonyult
Az egyébként többségében három fős csapatok egyforma alapjárműveket kaptak az idei évben is. A feladat mindenkinek egyformán nehéz volt, hiszen ugyanazokat az ügyességi és gyorsasági feladatokat kellett végrehajtania a versenyautóknak, ugyanazon pályán.
Misi és Dani elég komoly átépítésbe kezdett a Verdák című rajzfilm Matukájából inspirálódott Mateszen. A legfontosabb átalakítás a hátsókerék-kormányzás beépítése volt. Ez már önmagában is nagy kreativitásra utalt, amit egyébként a verseny szervezői el is vártak. Megkötés csupán néhány volt, azok inkább a teljesítményt érintették. A résztvevőknek egy gyorsasági és egy ügyességi pályát kellett teljesíteniük. Mindkét pályán egy fekete vezetővonal jelölte a követendő útszakaszt, amin végig kellett menniük az autóknak.
Az ügyességi részen előre ismert topológiájú úthálózaton kellett végighaladnia a versenyautóknak és összegyűjteni korongokat. Nehezítő tényező volt, hogy a pályán egy kalóz autó is gyűjtötte ezeket. Ennek pozícióját a versenyzők járművei megkapták egy vezetéknélküli hálózat segítségével, így a robotoknak saját döntéseket kellett hozniuk az útvonaltervezést illetően. Az ügyességi pályán található libikóka volt a hab a tortán, ha ezt átbillenti a versenyző, az további plusz pontokat jelentett.
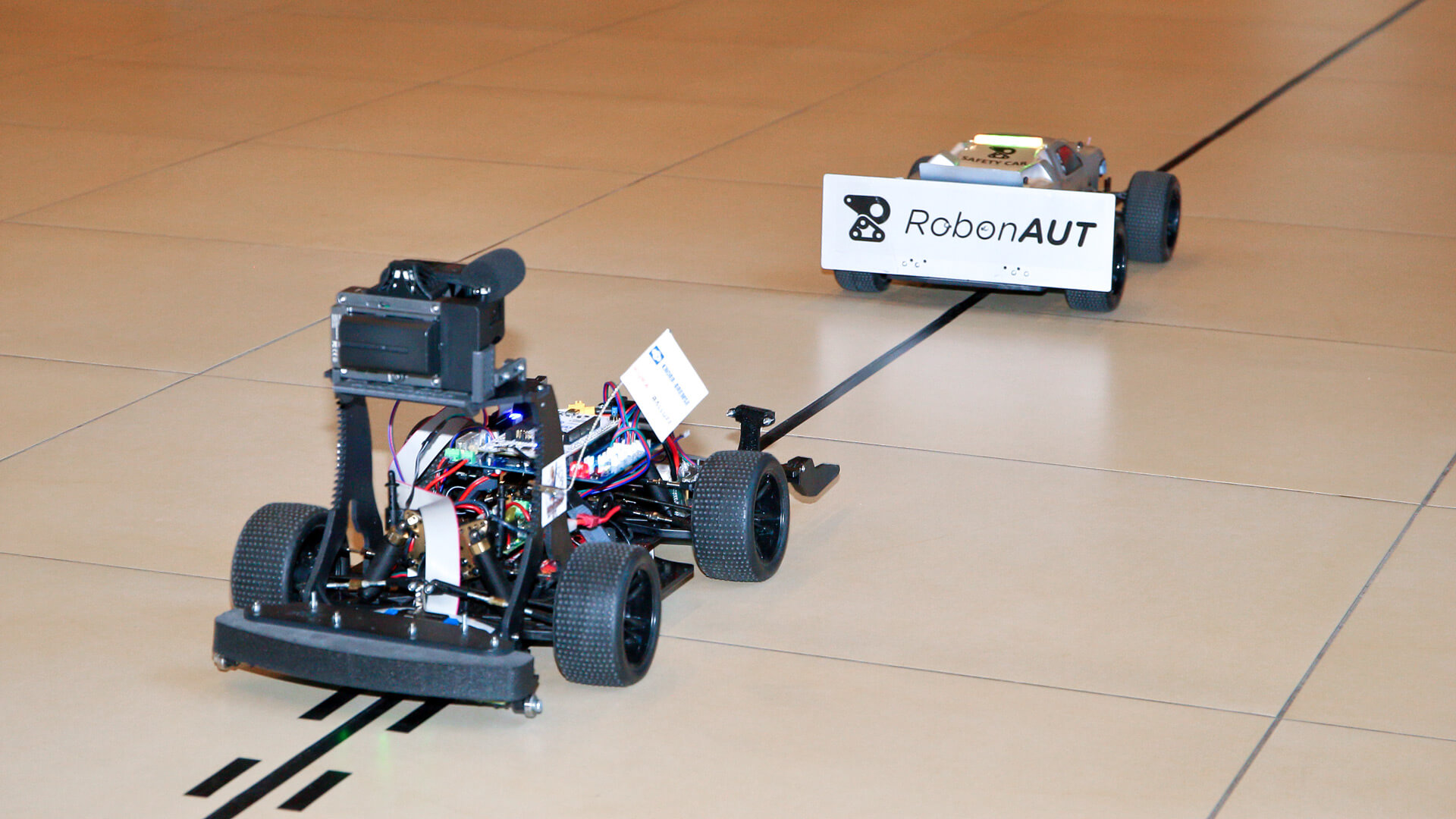
A gyorsasági rész is izgalmas volt, hiszen a pálya elején egy biztonsági autót kellett követni, majd azt a pálya kijelölt szakaszán plusz pontokért megelőzhette a versenyző. Ezt követően a minél jobb köridő elérése volt a cél, ami újabb értékes pontokat jelentett.
Az ütközés, vagy meghibásodás miatti emberi beavatkozás pontlevonással járt, a versenyt pedig a legtöbb ponttal rendelkező csapat nyerte.

Az idei 16. RobonAUT versenyt tehát a Sufnituning Kft. fantázianevű csapat nyerte, gyakornokunk a tavalyi junior második helyezést váltotta másodmagával szenior első helyre. Arról beszélgettünk vele, mi mindenre volt ehhez szükség!
BIoTB: Alaposan átalakítottátok az alap versenyautót, honnan jött az ötlet?
KMB: A félév elején minden csapat pontosan ugyanolyan autóval vágott neki a felkészülésnek. A saját elektronika, a különböző szenzorok és minden egyéb szükséges dolog elhelyezése az adott csapaton múlt. Nálunk a legnagyobb módosítás az autó közel tengelyszimmetrikussá alakítása volt, amibe beletartozott a hátsó kerekek kormányozhatóvá tétele. Az ötletet az adta, hogy így a megfelelő szoftveres vezérléssel ugyanúgy tud az autó hátrafelé haladni, mint előre, valamint a két tengely egyidejű kormányzásával sokkal kisebb kanyarodási ív és jobb menetdinamika érhető el.
BIoTB: Lehetett módosítani az egyes kvalifikációs körök után is?
KMB: Lehetőségünk volt egészen a döntő napjának reggeléig bármilyen hardveres és szoftveres módosításra. Szoftveresen az utolsó pillanatig folyamatosan fejlesztettük, viszont mechanikailag és hardveresen az első kvalifikáció után már csak pár apróbb módosítást végeztünk. Változtattunk például az autó hasmagasságán a nyomvonalat érzékelő szenzorok optimálisabb beállítása miatt.
Minden csapat az utolsó pillanatig fejlesztette az autóját, eltört alkatrészeket cseréltek, különböző ötleteket próbáltak ki a gumik tapadásának növelésére.
BIoTB: Egy négykerékkormányzást azért nem egyszerű megvalósítani…
KMB: Az egész hátsó futóművet át kellett alakítanunk. Bekerült egy saját tervezésű, 3D nyomtatott tartó. Erre fogattuk fel a szervomotort és lecseréltük a kerékagyakat, amikhez tolórudakat csatlakoztattunk. Azonban az autó mechanikai kialakításából fakadóan az első és hátsó kerekek nem ugyanakkora szögben voltak képesek elfordulni. Emiatt szoftveresen külön figyelnünk kellett a két tengely eltérő megengedett végkitérésére. A szervomotorok akár el is törhették volna az alkatrészeket a mechanikában, ha túlvezéreljük őket.
Az autót kimerevítettük, a lengéscsillapítók rugói helyére 3D nyomtatott, pontos hosszúságúra beállított (hasmagasság miatt) hengerek kerültek. Erre leginkább a szenzorok stabilabb érzékelése miatt volt szükség.


BIoTB: Az előzés sem feltétlenül egyszerű, hiszen az útvonalat egy fekete csík jelölte, ezt pedig így el kellett hagynotok egy időre.
KMB: A versenyszabályzat meghatározza, hogy a gyorsasági pálya egyetlen szakaszán, szabad csak balról előzni. Az autónk önállóan hozott döntést arról, hogy erre a szakaszra érve megkezdje-e az előzést. Ehhez figyelembe vette a biztonsági autó és a saját helyzetét. Ha például valami okból lemaradt volna korábban és a szakasz egy adott pontjáig nem ért volna elég közel akkor meg sem próbálta volna. A mi autónk biztonsági okokból az aktuális akkumulátor állapotot is figyelembe vette, hiszen a 3 gyorsasági kör csak ezután következett, amihez tartalékolni kellett elegendő kapacitást.
Adottak voltak a feltételek az előzés megkezdéséhez, így – a távolságszenzorokkal továbbra is figyelve – az autóban elhelyezett inerciális szenzor (IMU) segítségével megfelelő szögben kitért és elhaladt a biztonsági autó mellett, majd szintén az IMU segítségével visszatért a nyomvonalra.
BIoTB: Milyen szenzorokra volt szükségetek a teljes versenygép megvalósításhoz?
KMB: A követendő nyomvonalat az autó alvázán elhelyezett, infravörös szenzorok segítségével érzékeltük. Az autó előtti akadályok észlelését és azok távolságának meghatározását ultrahangos távolságszenzorokkal oldottuk meg.
Az autó a relatív orientációját egy inerciális modul (IMU) jeleinek feldolgozásával számoltuk ki. Az aktuális sebességet a hajtómotoron elhelyezett mágneses inkrementális enkóderrel érzékeltük. A start jelet és a kalóz autó aktuális pozícióját pedig egy 2.4GHz-es rádiófrekvenciás modulon keresztül kapta meg az autó a verseny központi vezérlőjétől.
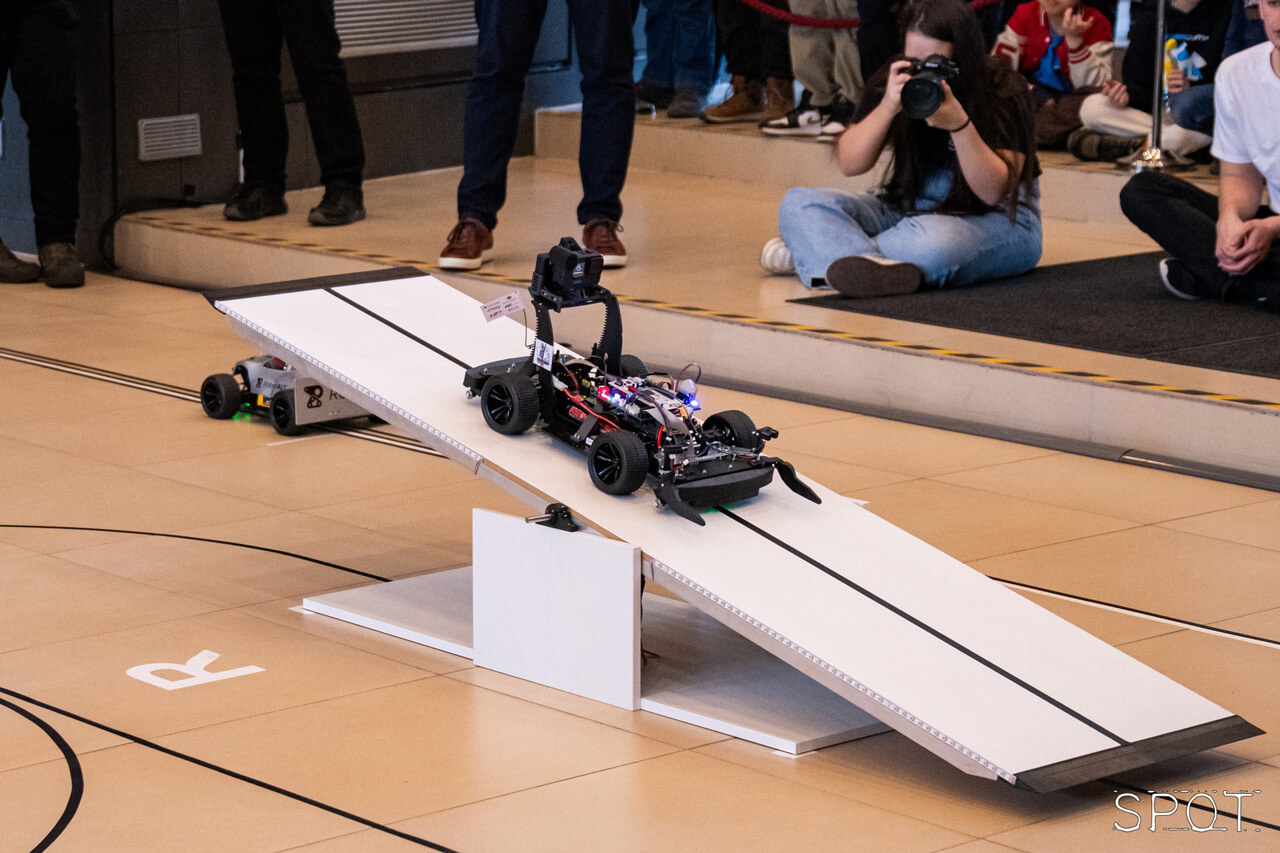
Matuka a legnehezebb akadályokat is könnyedén hagyta maga mögött a verseny során
BIoTB: Miért csak ketten dolgoztatok ezen, nem jelentett ez hátrányt?
KMB: A szenior lét előnye, hogy van egy alap ismerete az embernek a felmerülő megoldandó kihívásokról és problémákról. Mi két különböző junior csapat tagjai voltunk tavaly, így több, különböző megoldásunk is volt egy adott problémára. Természetesen három főnél könnyebb felosztani a különböző feladatokat egymás között, azonban mindketten eltökéltek voltunk a győzelemmel kapcsolatban.
A hardverrel kapcsolatos feladatok (nyomtatott áramkör tervezése és beültetése, szenzorok jelvezetékei, 3D nyomtatott alkatrészek tervezése) hozzám tartoztak, Dani pedig leginkább a szoftverrel, az útvonalkereső algoritmussal és a legjobb menetdinamikához szükséges modell alapú szabályozással foglalkozott.
Az autót mechanikailag közösen szereltük össze.
BIoTB: Tehát teljesen egyedi járművet építettetek hardveres és szoftveres szempontból is?
KMB: Maga a hardver és az autót vezérlő mikrokontrolleren futó beágyazott szoftver is teljesen egyedi. Az STM32 mikrokontroller egy nyomtatott áramkörre került, amelyen megtalálhatóak az áramkör védelmére szolgáló alkatrészek, visszajelzésre és felhasználói beavatkozásra szolgáló interfészek, az IMU, a rádiós modul, és az összes szenzorhoz külön dedikált csatlakozó.
Szoftveresen freeRTOS operációs rendszer alapú vezérlőrendszert készítettünk. A szenzorok adatainak feldolgozása, kiértékelése, a felhasználói interfész kezelése, a hajtómotor és a kormányzást végző szervomotorok szabályozása, és minden egyéb feladat elvégzése és döntés meghozatala ennek a szoftvernek a feladata volt.
Érdekesség, hogy a nyomvonalra történő szabályzást (kormányzást) úgy oldottuk meg, hogy váltható legyen egy PID szabályzó és a két tengely külön kormányozhatóságát figyelembe vevő modell alapú állapotteres szabályzó között, akár menet közben is. Ezzel az egyenesben rendelkeztünk a PID szabályzó egyszerűségével és megbízhatóságával, míg a kanyarokban a kifejezetten az autónk mechanikájára szabott modell alapú szabályzó pontosságával és menetdinamikájával.

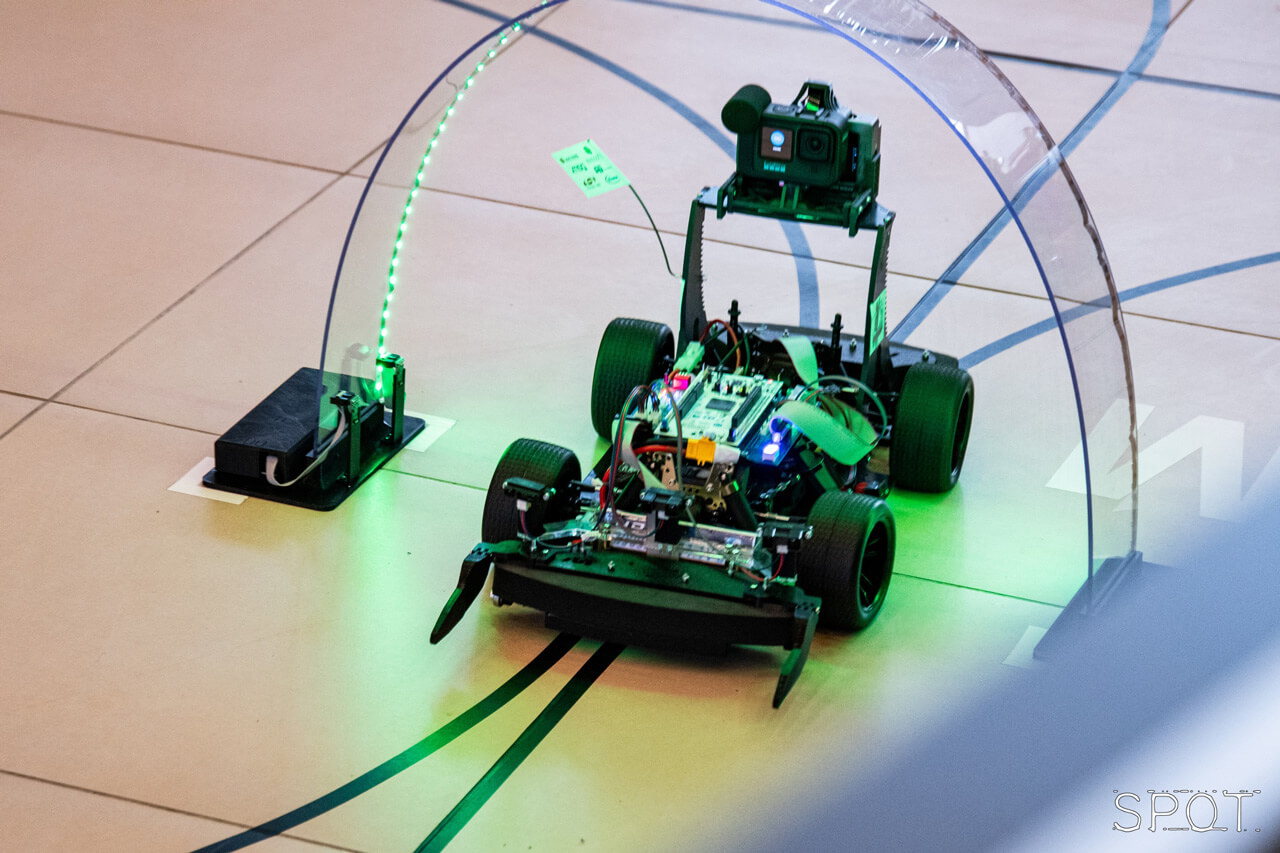
A verseny során sötétben is helyt kellett állnia a versenyautónak
A mikrokontrolleren futó beágyazott szoftver alapvetően C nyelven készült, ami egy általános programnyelv. Ez, valamint a modell alapú szabályzáshoz használt C++ a mai napig egyeduralkodó a beágyazott szoftverek területén, az ilyen projektek 80 százaléka ma is ezeken készül.
Készült egy WPF alapú kliens alkalmazás is C#-ban, amely egy kimondottan objektumorientált programozási nyelv. Ezzel vezeték nélkül, valós időben lehet monitorozni az autó belső változóit és akár átállítani egyes paramétereket.
BIoTB: Ezek után azt hiszem joggal merül fel a kérdés, hogy mivel foglalkozol a Bosch Budapesti Fejlesztési Központjában és milyen távlati céljaid vannak?
KMB: Hardverfejlesztő gyakornok vagyok. Jelenleg az egyetemi diplomatervemet képező projekten dolgozok, amelynek keretében egy nyomásimpulzusalapú-tesztrendszert fejlesztek nyomásszenzorokhoz. A Boschnál látott pontos feladatbeosztás sokat segített a felkészülés során abban, hogy időben elkészüljünk a határidőkre.
Mindenképpen a beágyazott területen szeretnék elhelyezkedni, azon belül is a hardver irányba húz a szívem. Az autók iránti érdeklődésem miatt is fogott meg ennyire a verseny. Számos egyetemi ismerősöm a Boschnál teljesítette szakmai gyakorlatát és összességében nagyon jókat hallottam a különböző osztályokról.
BIoTB: Lesz még lehetőséged indulni a versenyen, egyáltalán maradt még ötleted?
KMB: Bármikor lesz lehetőségem visszatérni, még az egyetemi tanulmányaim befejezése után is. Van még pár ötlet, technikai megoldás amire idén sajnos nem jutott idő, így szeretnék jövőre is indulni. Azonban akkorra már mindenképpen a teljes állás a célom, meglátjuk mellette belefér-e majd esetleg egy címvédés.
A csapatnak maradt még ötlete a következő versenyre is
Hardveresen abszolút elégedett vagyok az autóval, megpróbáltam mindenre felkészíteni a saját tervezésű nyomtatott áramkört és a tapasztalatok alapján ez sikerült is.
Szoftveresen sok téren lehetne még finomítani, gyorsítani a rendszeren. Felmerült egy kósza ötletként a négy kerék egymástól független hajtása és kormányzása. Ez lehetővé tenné akár a helyben megfordulást is, viszont további hardveres és szoftveres változtatásokhoz lenne szükség a megvalósításához.
Misi és Dani sikere több szempontból is különleges. Az ügyességi pályán mindvégig elkerülték a kalóz autót, még akkor is, amikor az szervezői hibából adódóan eltévedt és rossz helyen állt meg.

Matesz átbillentette a libikókát és beállít a biztonsági autó mögé. A gyorsasági szakaszon pedig előbb megelőzte a biztonsági autót, majd megfutotta a verseny leggyorsabb körét is!
Ehhez persze rengeteg felkészülésre volt szükségük. Bence saját bevallása szerint a döntő előtti három napban összesen 11 órát aludtak, közel 9000 sor kódot írtak, az összegyűlt telemetria adatok mennyisége pedig több mint 1 GB volt.
A versenyről készült videó
Az autonóm járművek és az ehhez kapcsolódó mesterséges intelligencia fontos területek. A Bosch Tech Compass felmérés eredményei alapján a nagyközönség 17 százaléka már Magyarországon is úgy látja, hogy az önvezetés 10 év múlva a legmeghatározóbb technológia lehet. Ráadásul a válaszadók 14 százaléka szerint ez kiemelkedő mértékben szolgálja a társadalmat. Ezek ugyan valamivel alacsonyabb százalékos arányok, mint a globális válaszadók esetében, ugyanakkor a felmérés magyarországi résztvevőinek 87 százaléka tisztában van azzal, hogy mi az önvezetés és mire szolgál.
A további fejlődéshez pedig elengedhetetlen, hogy az ifjú mérnökgeneráció olyan versenyeken mérje össze tudását, mint a RobonAUT.


