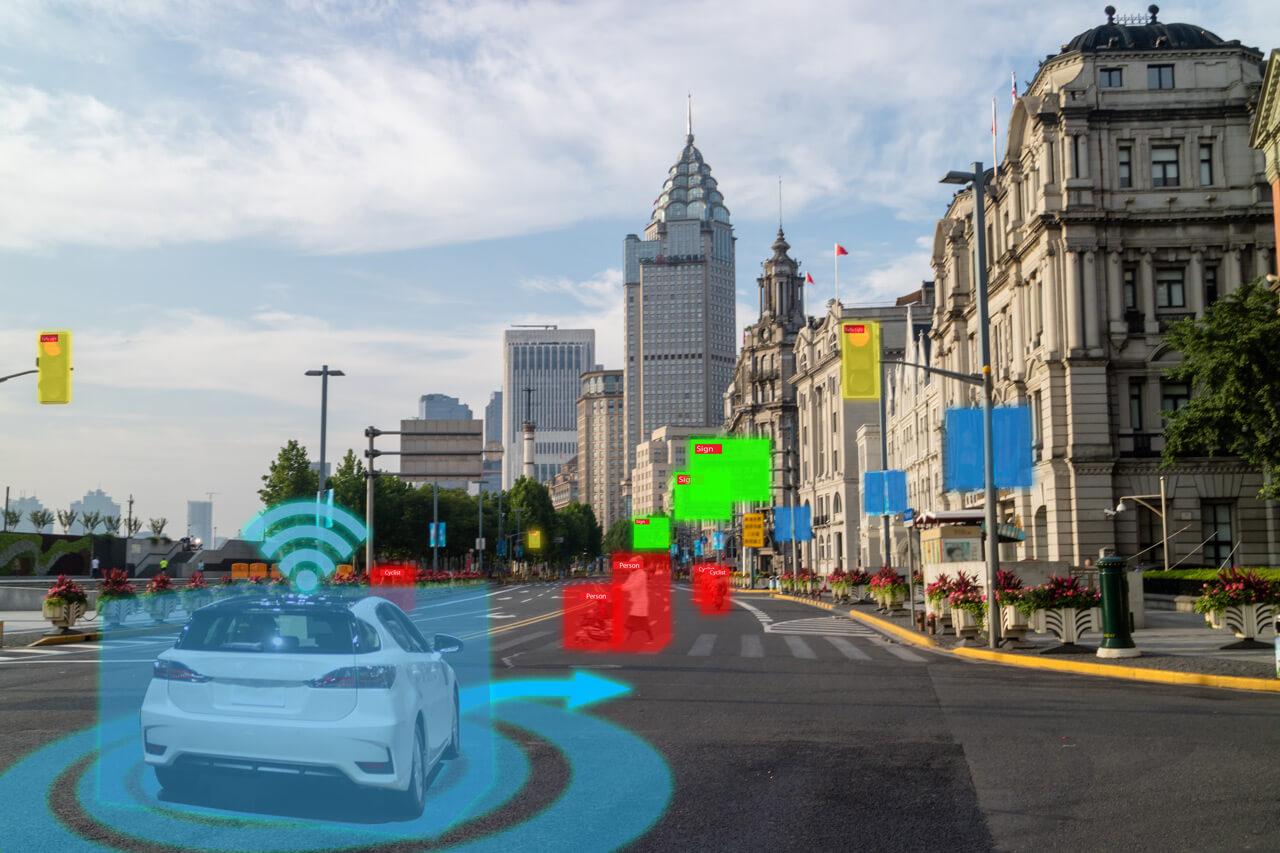
Rengeteg információt gyűjt be egy önvezető jármű a környezetéről, hiszen a közlekedés valamennyi szereplőjét folyamatosan figyeli. Fontos, hogy az autó rendszere rangsorolni is tudja, hogy melyik adat mennyire fontos, vagyis azt, hogy adott pillanatban mire vagy kire kell reagálnia. A Bosch kutatói ilyen, feladatorientált algoritmus fejlesztésén dolgoznak.
A biztonság a legfontosabb a közúti közlekedésben! Közhelynek tűnik ez a kijelentés, de az önvezető autók esetében különösen igaz és fontos mindez. Elég ugyanis egyetlen olyan közlekedési baleset, amelyet önvezető jármű okoz, hogy csökkenjen a bizalom a technológia iránt. Ezért a szoftverfejlesztő szakemberek kiemelt figyelmet fordítanak arra, hogy minden váratlan helyzetre felkészítsék a járműveket, így arra is, hogy az algoritmusok képesek legyenek „megjósolni” a közlekedés résztvevőinek várható jövőbeli cselekvéseit, reakcióit, és ezek alapján döntéseket hozni.

Gyalogosok kiemelt helyen
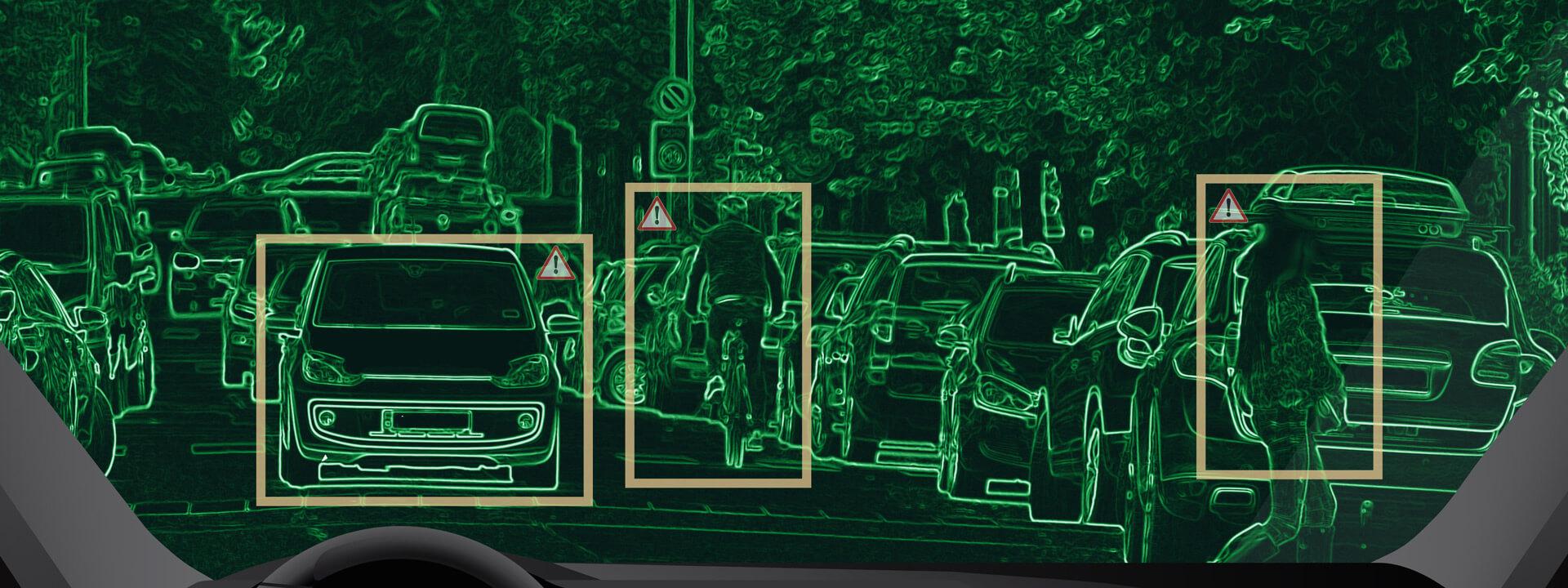
Sokszor azonban nem csak egy másik jármű viselkedését kell kikövetkeztetni, a közlekedés legvédtelenebb szereplői, a gyalogosok reakciói különösen fontosak a balesetek megelőzése és az önvezető autók fejlesztése során. A Bosch kutatói ezért most olyan algoritmusok fejlesztésén dolgoznak, amelyek a gyalogosokra is fókuszálnak.
A közlekedők bizalmát ki kell vívnia az önvezető járműveknek
Térképek nélkül nem megy
A hajszálpontos és folyamatosan frissülő térképek is fontosak az önvezető autók fejlesztéséhez. A legújabb térképek például jelölik a járművek számára a sávok határait és a járható területeket. Ezek a részletek pontosabb észlelési algoritmusok kidolgozását teszik lehetővé, amelyek elengedhetetlenek a biztonságos közlekedéshez.
A nagyfelbontású térképek ugyanis lényegében tervrajzként szolgálnak a rögzített objektumok, például közlekedési táblák azonosításához. Persze a térképeknek aktuálisnak kell maradniuk, hogy folyamatosan a legfrissebb információkat biztosítsák.

A térképeknek minden eddiginél pontosabbnak kell lenniük
Feladatorientált algoritmus priorizál
Mivel ahogy már említettük, rengeteg információt gyűjt be a környezetéből egy önvezető jármű, fontos, hogy azt is el tudja dönteni, adott pillanatban mi mennyire fontos az adatok közül. Azt, hogy a közlekedésben résztvevők közül ki vagy mi mennyire releváns az önvezető autók algoritmusai számára, a szakemberek mérőszámokkal tudják meghatározni. A legtöbb ilyen mérőszám a forgalom résztvevőinek és az önvezető autóknak dinamikus interakcióján alapul. A biztonságos mozgástervezés alapja, hogy a rendszer hajszálpontosan érzékelje környezetét, például azt, ha egy gyalogos a jármű útját keresztezheti. Ilyenkor tehát különösen fontos, hogy a jármű és a veszélyeztetett úthasználó között legyen interakció.
Egy ilyen észlelési funkció megalkotásához különböző forgatókönyveket alkalmaznak a szakemberek, vagyis tipikus viselkedési mintákat integrálnak a rendszerbe. Elengedhetetlen azonban az is, hogy az általános viselkedésminták mellett az adott, konkrét helyzetet is érzékelje a program, és figyelembe vegye azt, hogy egy gyalogos mozgása mennyire releváns a járműre nézve. Ha például a járda szélén tartózkodik és az úttest irányába halad valaki, akkor nyilvánvalóan kiemelten figyelni és adott esetben reagálni kell rá, ha viszont egy másik személy az úttesttől távolabb tartózkodik és nem a jármű irányába halad, akkor nem lesz releváns az adott pillanatban. Az ezeket az információkat leíró mérőszámokat építik be szakembereink az algoritmusba. Egyrészt tehát figyelembe kell venni a gyalogosok és az önvezető jármű közötti távolságot, másrészt a mozgás irányát és sebességét, hogy pontos eredményeket kapjanak a Bosch mérnökei, végül a járművek is.
A jövőt is látni kell
Kulcsfontosságú emellett persze az is, hogy a gyalogosok lehetséges jövőbeli viselkedését is modellezzék a mérnökök, továbbá, az adott szituációban a lehető legvalószínűbb viselkedési mintát vegyék alapul. A Boschnál több ilyen jellegű kutatás is zajlik, például a Horizon 2020 projekt keretein belül, az UnCoVerCPS.
Ebben a projektben olyan adatbázist hoztak létre, amely a mozgási tartomány kapcsán is rögzít információkat, például a gyalogosok helyzetével, vagy haladási irányával és sebességével kapcsolatban. Az adatkészlet egymást követő képek sorozatait használja, így elemezni lehet a lehetséges interakciókat. Minden egyes képhez a fent leírtak szerint számítják ki a mérőszámokat a mozgástartományból származó információk alapján. Ezután a képekhez hozzárendelik a gyalogosokra vonatkozó értékeket. Ebben a kibővített adatkészletben már azonosíthatók a biztonságos közlekedés szempontjából releváns mozgások.
Az animáció egy kritikus szituációt mutat be, ahol az önvezető jármű közeledik egy álló gyalogoshoz. A pályapontok (fekete) és az út geometriája ismeretében minden időpillanathoz külön számítást végeznek a mérnökök, hogy számszerűsíteni lehessen a helyzet kritikusságát.
A fenti megközelítés tehát lehetővé teszi az észlelési funkciók fejlesztői számára, hogy azonosítsák azokat a kulcsfontosságú interakciókat, amelyek döntőek a biztonság szempontjából, mindez az észlelési funkció további fejlesztésének alapja. Ez a módszer nemhogy alkalmazható a mesterséges intelligencián alapuló rendszerek esetében, hanem különösen hasznos is azok kapcsán.


