A deep learning (mélytanulás) módszer segítségével fejlesztenek radarszenzorokat a Bosch mérnökei. Az új rendszer célja az, hogy még hatékonyabban működjenek az önvezető és vezetőtámogató rendszerekben ezek az eszközök.
A kutatásoknak már megvan a következő fázisa is: azt szeretnék megoldani, hogy az autókban elhelyezett összes érzékelő „egy nyelvet” beszéljen, vagyis a szenzorok hatékonyan tudjanak kommunikálni egymással.
Összehangolt rendszerek
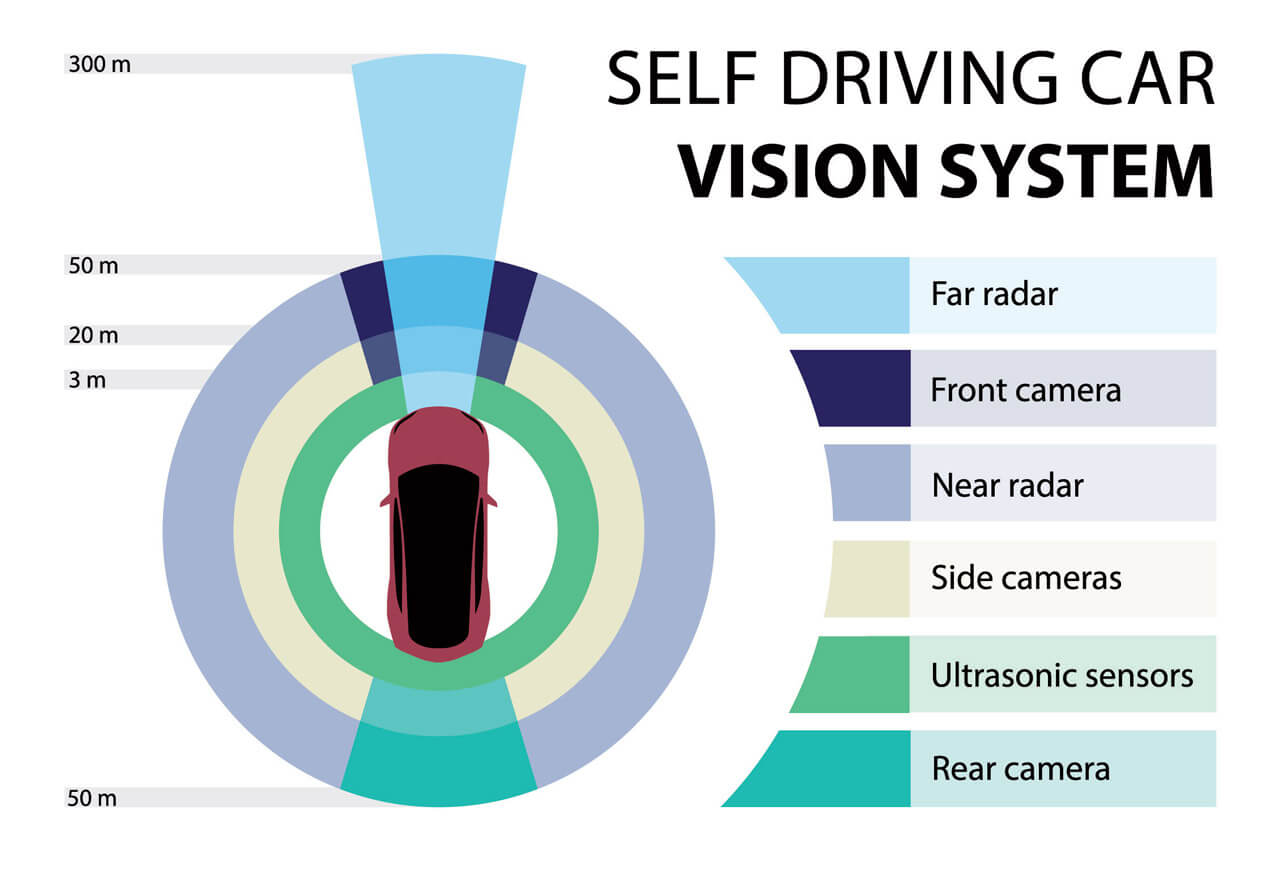
Az önvezető és fejlett vezetőtámogató rendszerek nemcsak kényelmesebbé, biztonságosabbá és szórakoztatóbbá teszik az utazást, hanem még a közlekedési torlódásokat is képesek csökkenteni. Ahhoz azonban, hogy az asszisztensrendszerek biztonságosan és megbízhatóan működjenek, elengedhetetlen, hogy a járművek környezetét pontosan feltérképezzük. Ezt az autók különböző érzékelőitől származó információk hatékony feldolgozásával lehet elérni, vagyis a radar-, kamera- és – opcionálisan – a lidarrendszerek adatainak kombinálásával.

Nemcsak a radarok, hanem a lidar-érzékelők is komoly szerepet kaphatnak a jövőben
A radartechnológia előnye, hogy robusztus és megbízható, ráadásul ezek az érzékelők viszonylag kedvező költségoldal mellett előállíthatók és széles körben elérhetőek. Emellett pedig könnyen be is építhetők a járművekbe, akár feltűnés nélkül is. Persze a radaradatokkal kapcsolatban is akadnak még bizonyos megoldandó kihívások. Például az, hogy az adatokat általában pontfelhőként jelenítik meg, amelynek rossz a térbeli felbontása.
A radarok által generált pontfelhők térbeli felbontása viszonylag rossz
A radarral összehasonlítva a kameraadatok információsűrűsége lényegesen nagyobb ugyan, de a kamerák rossz fényviszonyok esetén nem szolgáltatnak kellően megbízható információkat. Az objektumok azonosításához tehát többféle, egymástól függetlenül működő érzékelőre van szükség.
Életre tervezett radarok
A Bosch által indított kutatási projekt célja ezért az, hogy mélytanulás segítségével fejlesszék a radarérzékelést, és így javítani lehessen az objektumfelismerés hatékonyságát.
A kutatócsapat a Bosch Research tíz szakértőjéből, valamint a Bosch Cross-Domain Computing Solutions részlegének szakembereiből áll. Ez utóbbi automatizált járműrendszereket fejleszt, forgalmaz és értékesít járműgyártók számára. A Bosch Research csapatának tagjai Németországban, az Egyesült Államokban és Izraelben található helyszíneken dolgoznak, és az érzékelés, a jelfeldolgozás és a gépi tanulás szakértői. Az elméleti kutatást és a gyakorlati tapasztalatot ötvöző megközelítés lényege, hogy olyan kérdésekre kapjanak választ és találjanak megoldást, amelyek jól használhatóak a hétköznapokban.

Mélytanulás alkalmazásával többet tudunk hasznosítani a radarok által összegyűjtött adatokból
Így működik a deep learning
A szakemberek tehát a mélytanulás által biztosított lehetőségeket kutatják, a fókusz pedig elsősorban a jelfeldolgozáson és a képfelismerésen van, ez jól alkalmazható a hétköznapi életben, például a visszaverődő radaradatok értelmezésére.
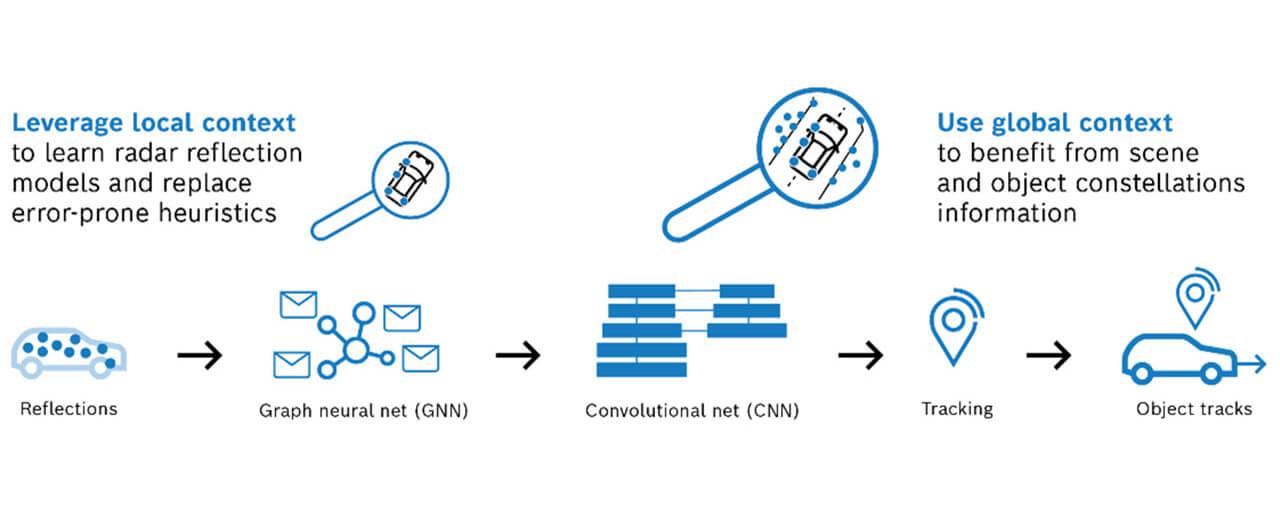
A mélytanulásos módszerhez neurális hálózatokat használnak, amelyek a bemeneti és kimeneti rétegek között kiterjedt belső struktúrát alkotnak és rejtett rétegeket hoznak létre. Ezek mindegyike egyre absztraktabb megjelenítése a beérkező adatoknak. A kimeneti rétegben ezután a feldolgozott információk összeolvadnak, hogy az eredményt – az azonosított objektumot – előállítsák.
Rengeteg adatra van szükség
Ezeknek a neurális hálózatoknak – amelyek tulajdonképpen tekinthetők egyfajta mesterséges intelligenciának is – a fejlesztéséhez hatalmas mennyiségű, a radarpontfelhőkből és az észlelt objektumokból származó adatot használnak fel. Az emberi tanuláshoz hasonlóan ugyanis a helyes és helytelen megoldások is hozzájárulnak a tudás fokozatos elsajátításához.
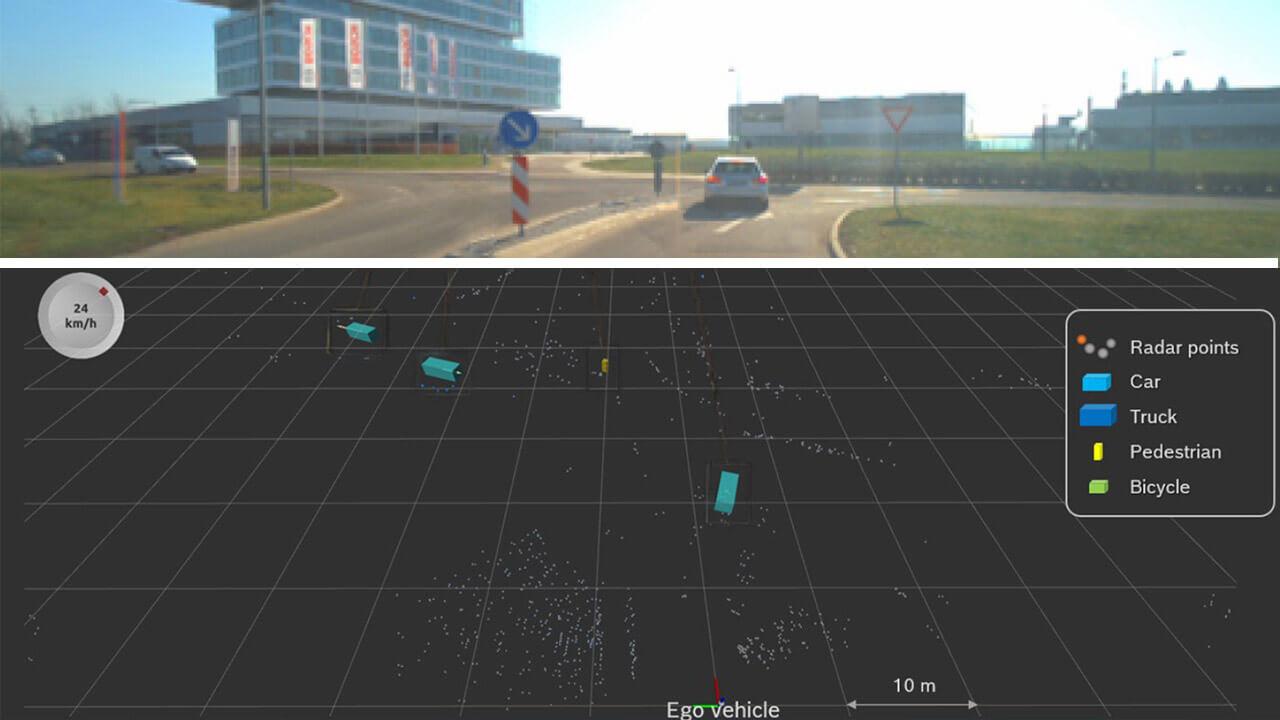
A rengeteg információ segítségével az említett projektben a cél a radarpontfelhőkből származó objektumok – például járművek és gyalogosok – helyes azonosítása, valamint méretük, mozgásirányuk és sebességük meghatározása.
Végül a felhalmozott tudás aztán egy tényleges alkalmazásban a járműben lévő fúziós komponens rendelkezésére áll. Ennek célja a sok különböző érzékelőtől származó adat egyesítése és a jármű környezetének pontos feltérképezése.
Következő lépés: a közös nyelv megalkotása
Az érzékeléssel kapcsolatos kutatások egyik következő állomása egy olyan új alapmodell lesz, amely integrálja a járműérzékelők különböző adatait. Erre azért van szükség, mert az érzékelők – legyenek azok különböző típusú radarérzékelők vagy a járműben megtalálható más szenzorok – közérthetően fogalmazva mind „különböző nyelveket” beszélnének. Vagyis az alapmodell célja, hogy egy nagy neurális hálózatban gépi tanulást alkalmazva találjon egyfajta közös nyelvet, amelyen a különböző érzékelők kommunikálni tudnak egymással. Ezen túlmenően a mélytanulási folyamatot ki kell terjeszteni a radarjelek feldolgozására is, hogy az automatizált vezetési feladatokhoz a robusztus radarérzékelő technológia és a mesterséges intelligencia kombinálásából származó teljes potenciált ki lehessen aknázni.

A Bosch mérnökei több helyszínen dolgoznak, több járművel és az eredményeket folyamatosan ellenőrzik


