Többször foglalkoztunk már azzal, hogy a különböző algoritmusok hogyan tanulnak – akár a Budapesti Fejlesztési Központban. Most azonban egy nagyobb képet, vagyis a tanuláshoz kapcsolódó kihívásokat és az ezekre megoldást jelentő módszereket mutatjuk meg.
Ha mindenki olyan helyen élne, mint Kalifornia, valószínűleg már rég közöttünk járhatnának az önvezető autók. Nem csak azért fejlesztenek a világ azon részén rengetegen autonóm rendszereket, mert egyébként is ott a tech cégek székhelye. Az ottani időjárási és útviszonyok kimondottan kedvezőek a fejlesztés kezdeti szakaszában. Hiszen az utak szélesek, a forgalom bizonyos útszakaszokon csekély, az időjárás jó, az infrastruktúra pedig példás. A felelős és globális fejlesztési programot működtető cégek azonban gyorsan rájöttek, hogy a változó fényviszonyok, vagy az eső nehéz helyzetbe hozzák a kamerákat, a havazás ellehetetleníti a radarszenzorok működését. A kisebb terek – amik a városi környezetet jellemzik – és a szegényesebb infrastruktúra pedig egészen más kihívások elé állítják az önvezető autókat.

Ez a kép kiváló példa arra, hogy milyen kihívásokkal kell megküzdenie az önvezető járműnek akár egy táblafelismeréssel kapcsolatban
Irány a nagyvilág
Ezért döntött korábban úgy a Bosch, hogy az önvezető rendszerek fejlesztését szinte minden kontinensen megkezdi. Nem arról van szó természetesen, hogy az ausztrál, a kínai, vagy épp a magyar csapat teljesen külön program mentén dolgozik. Szoros kooperáció folyik a fejlesztési központok és a mérnökök között. Ennek köszönhető, hogy a tapasztalatok, no meg a különböző helyeken gyűjtött alapok egészen új színt hoztak az önvezetéshez kapcsolódó mesterséges intelligencia algoritmusok fejlesztésébe is.
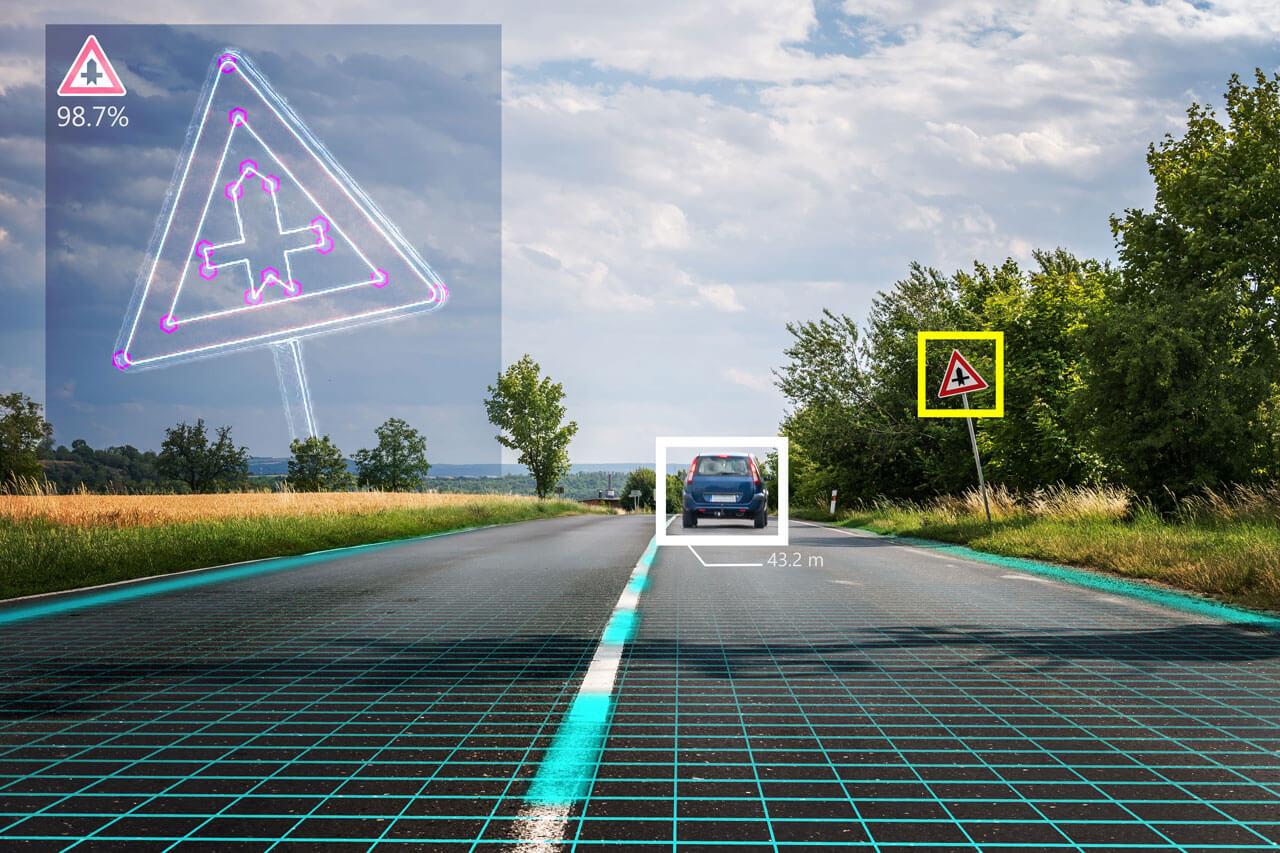
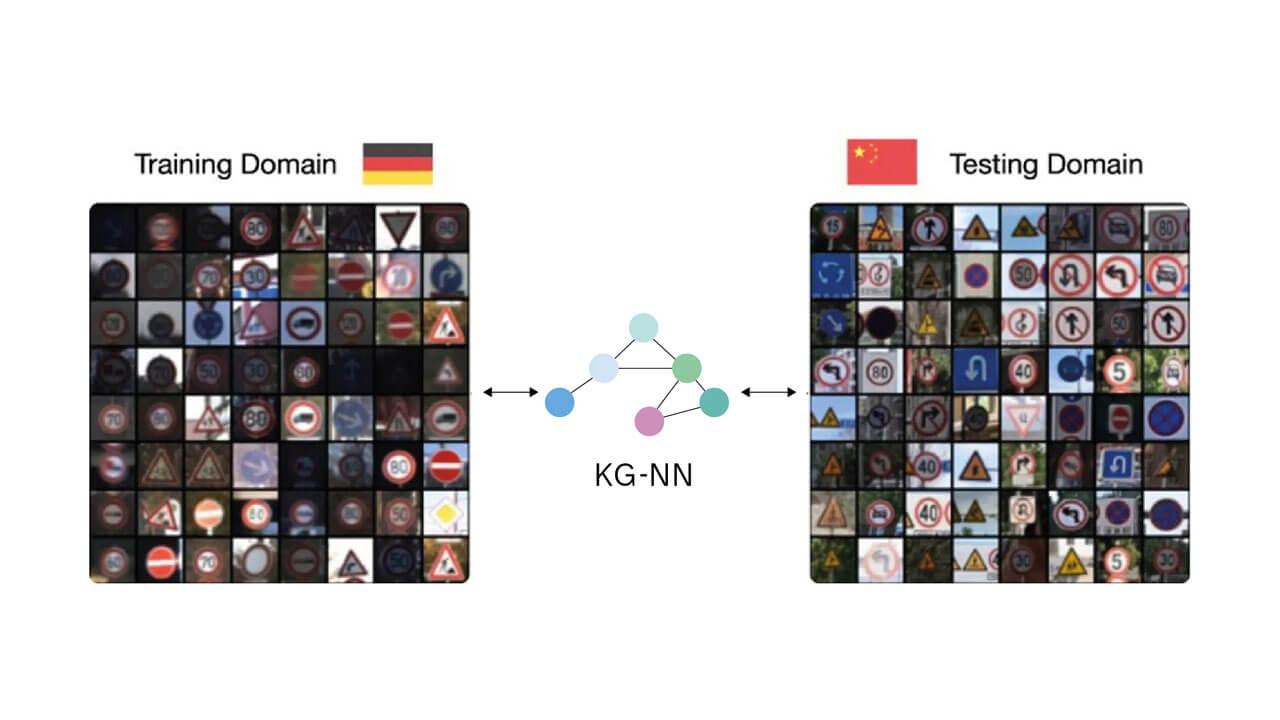
A különböző közlekedési táblák pontos azonosítása minden rendszer alapja
Nézzünk egy konkrét példát. Kínában és Németországban dolgozó mérnökeink érdekes kísérletet folytattak, amikor az önvezetéshez kapcsolódó gépi látás feldolgozásának lehetőségeit tanulmányozták. Egész egyszerűen vettek egy „állj, elsőbbségadás kötelező” táblát és megvizsgálták az annak azonosításához kapcsolódó nehézségeket. A mély tanulási módszerektől azt várták a szakértők, hogy javul a felismerhetőség a sérült, eltakart, vagy egész egyszerűen más formátumú (szabványú) táblák esetében is. Ez azért fontos, mert a gyártóknak hatalmas feladat és költség lenne minden piachoz optimalizálni a járműveket. Gondoljunk csak bele, csupán az milyen tortúra lenne e nélkül, ha egy Angliában forgalomba helyezett autóval szeretnénk Franciaországba utazni.
Új módszert dolgoztunk ki
A trieri egyetemmel közösen a Bosch mérnökei egy tudásgráf alapú neurális hálót dolgoztak ki. Ez ötvözi a szimbolikus és szubszimbolikus gépi tanulási módszereket. A stoptáblánál maradva a mérnökök a kínai és a németországi táblák felismerését vizsgálták az új módszerrel. Ennek keretében a rendszer egy vektortérben elemzi a kamera által rögzített képeket/adatokat. Ebben figyelemmel követi a nyolcszögletű táblákhoz kapcsolódó pontokat, amelyeket összehasonlít a korábbi, betanított képek adataival. Vagyis nemcsak képet hasonlít képpel, hanem sokkal pontosabb koordinátákat koordinátákkal.
A tesztek során ez az algoritmus sokkal jobban teljesített a „hagyományos”, kizárólag vizuális elemzésre építő társánál. A különbség különösen akkor jelentős igazán, amikor nem átlagos, hanem bonyolult, váratlan helyzetek adódnak. Ilyen például az időjárás miatt nehezen felismerhető, az elfordított, vagy éppen a sérült tábla is.
Mélyvíz
Az egyszerűbb tesztek után a mérnökök komoly próbatétel elé állították a rendszert. A Németországban betanított új algoritmust Kínában kezdték használni, párhuzamosan egy hagyományos „társával”. Az eredmények azt mutatták, hogy 7,1 százalékkal pontosabb működést biztosított a tudásgráf alapú neurális háló. A legnagyobb eredmény azonban nem is ez volt, hanem az, amikor mérnökeink a németországi adatkészlet mellé kínai forrást is biztosítottak a tanulás során. A kísérleti MI a teljes kínai adatkészlet kevesebb mint ötven százalékát kapta meg a németországi alapok mellé és ez már elegendő volt ahhoz, hogy jobban teljesítsen, mint az alapjául szolgáló teljes kínai verzió…
Az új algoritmus a gyakorlatban is bizonyított
A táblafelismerés csak a kezdet
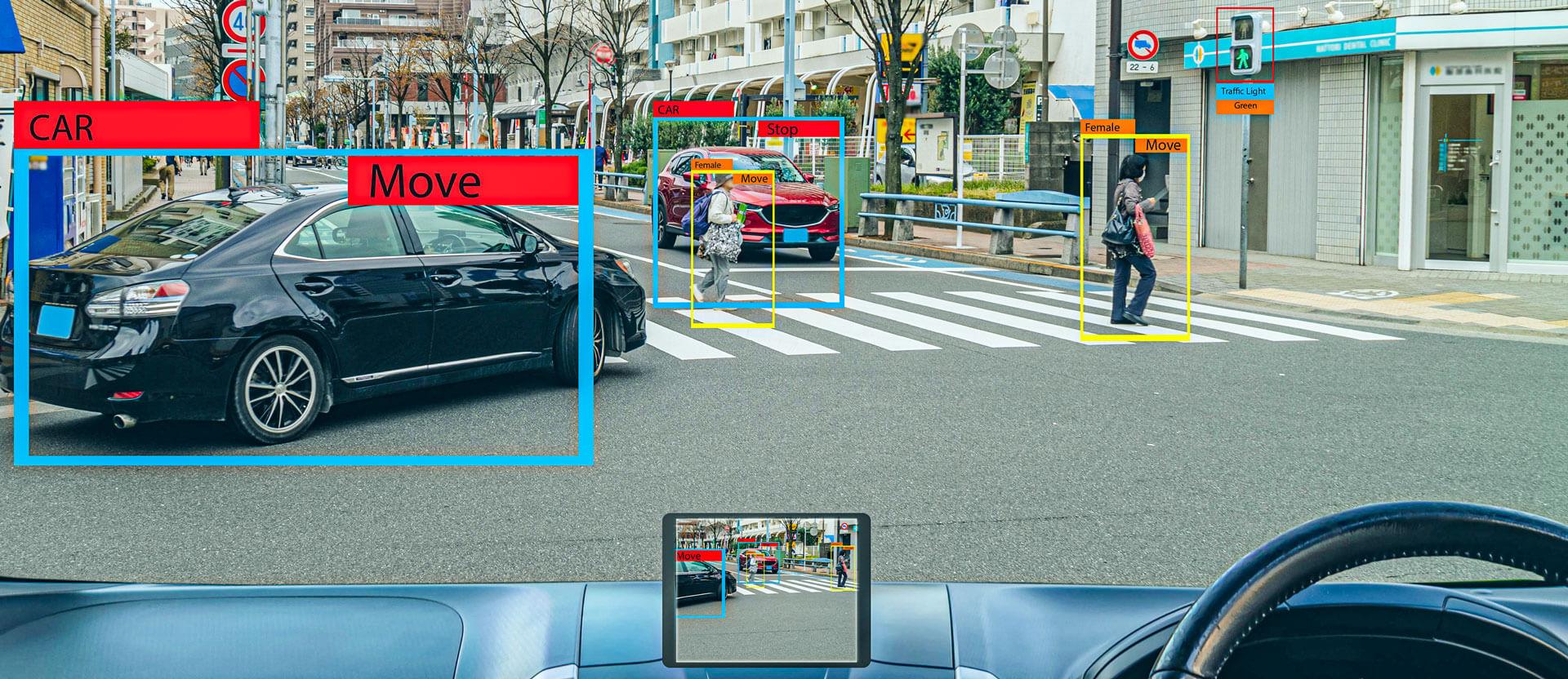
Gondoljunk csak bele, ha egy olyan egyszerű feladat kapcsán, mint a táblafelismerés ilyen eredményekre képes, milyen lehetőségek rejlenek a módszerben az összetettebb projektek kapcsán. Vegyük például az egyik legnehezebb feladatot, az út mellett parkoló autó takarásából labda után kiszaladó gyerek felismerését és a jármű lefékezését. A gyerekek eltérő mérete, felépítése különösen nehézzé teszi az objektumként való azonosításukat. A tudásgráf alapú algoritmusok azonban sokkal pontosabban azonosíthatják a környezetet. Az út mellett lévő lakó és pihenőövezetet, vagy iskolát jelző táblától egészen a távolban gyorsan mozgó gyerekekig igaz ez. Így a rendszer egészen másként tud az útviszonyokhoz alkalmazkodni a potenciális veszélyforrások környezetében.
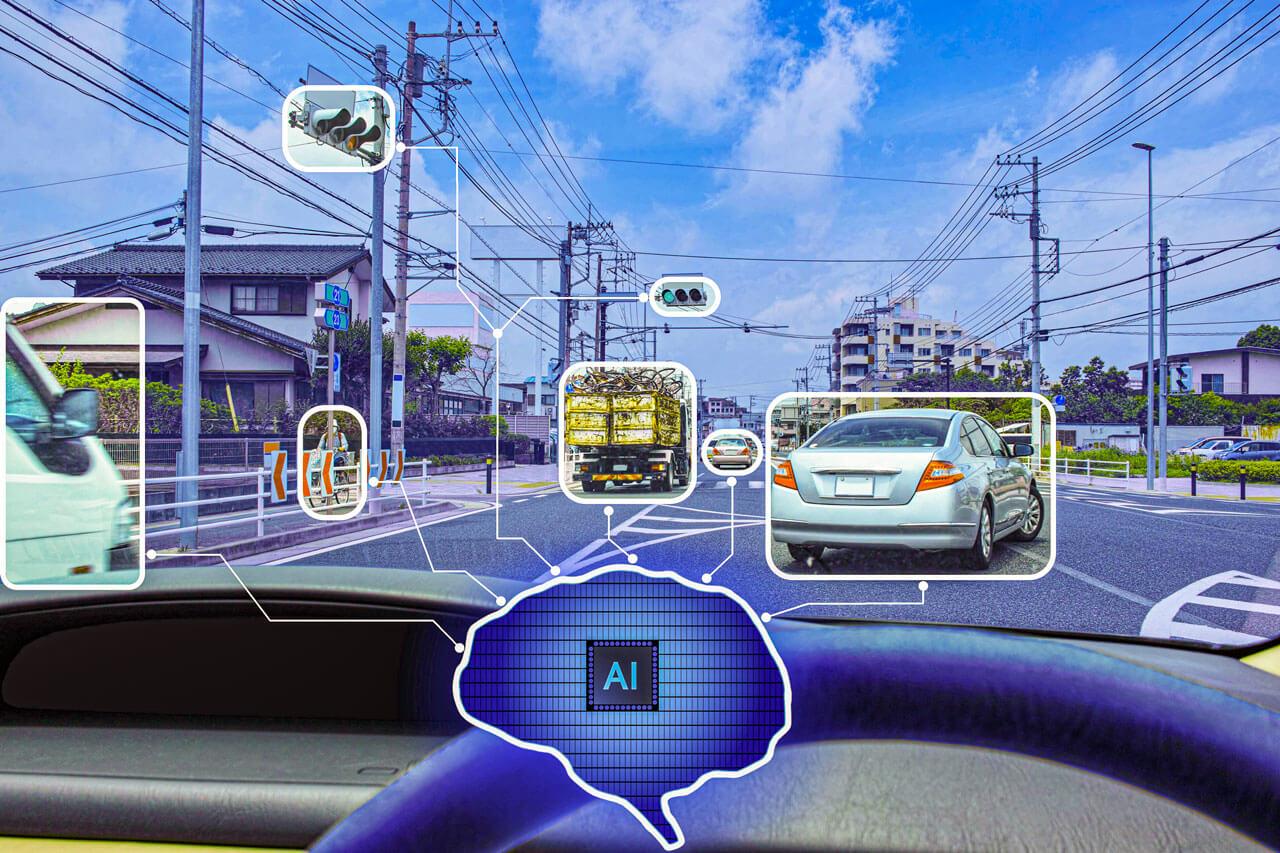
Az objektumok pontos azonosítása kulcsfontosságú a jövő járműveinek
Ezekben a nemzetközi projektekben magyarországi és magyar mérnökök is részt vesznek. A megfogalmazás nem véletlen, hiszen a könnyebb kooperáció érdekében sok kiváló magyar mérnök dolgozik a Bosch különböző fejlesztési központjaiban, ahogy Budapesten is sok külföldi kolléga találhatunk. Ebben a nemzetközi együttműködésben rejlik a Bosch ereje az önvezetés fejlesztése kapcsán. Ha érdekelnek az eddig bemutatott mesterséges intelligencia projektjeik, kattints