
Aki ismeri a Bosch hozzáállását, már tudhatja mit gondolunk az önvezető autókról: minden körülményre fel kell készíteni az ilyen járműveket, sőt, ezek térnyerése előtt már a vezetőtámogató rendszereket is.
Biztonság, mindenekelőtt

Nemcsak hardveresen, szoftveresen is folyamatosan fejlődnek a biztonsági kiegészítők
A Bosch eszközei, például a blokkolásgátló (ABS), az elektronikus menetstabilizáló (ESP) és a fejlett vezetőtámogató rendszerei már jó ideje segítenek megelőzni a súlyos közlekedési baleseteket. Hogy ez a jövőben is így maradjon, szakembereink folyamatosan dolgoznak azon is, hogy még hatékonyabb eszközöket fejlesszenek. Már csak azért is fontos ez, mert a vezetőtámogató és önvezető rendszerek egyre bonyolultabbak, hiszen egyre több közlekedőre és közlekedési módra kell figyelniük. Éppen ezért az sem csoda, hogy szoftveres hátterük egyre összetettebb.
A probléma, amellyel mérnökeink időről-időre szembesülnek: hogyan tehetik még biztonságosabbá ezeket a már jelenleg is kifinomult és a jövőben még inkább tökéletesített funkciókat? A megoldás, hogy már a fejlesztési folyamat kezdeti szakaszában a biztonságra fókuszálnak, vagyis ennek megfelelő módszerek szerint dolgoznak.
Pontosan emiatt alkottak két koncepciót is a biztonságos útvonalkövetéshez, amelyek jól példázzák a fenti problémára adható válaszokat. Ezek a koncepciók segítenek a dinamikus rendszerek kezelésében, vagyis azt mutatják be, hogy a mozgásvezérlés alkalmazása hogyan működik vezetőtámogató és önvezető rendszereknél.
Megoldandó problémák
Nézzük meg először, hogy a jelenleg leggyakrabban használt, klasszikus vezetéstechnikai módszereken alapuló mozgásvezérlő rendszereknek mik az Achilles-sarkai?
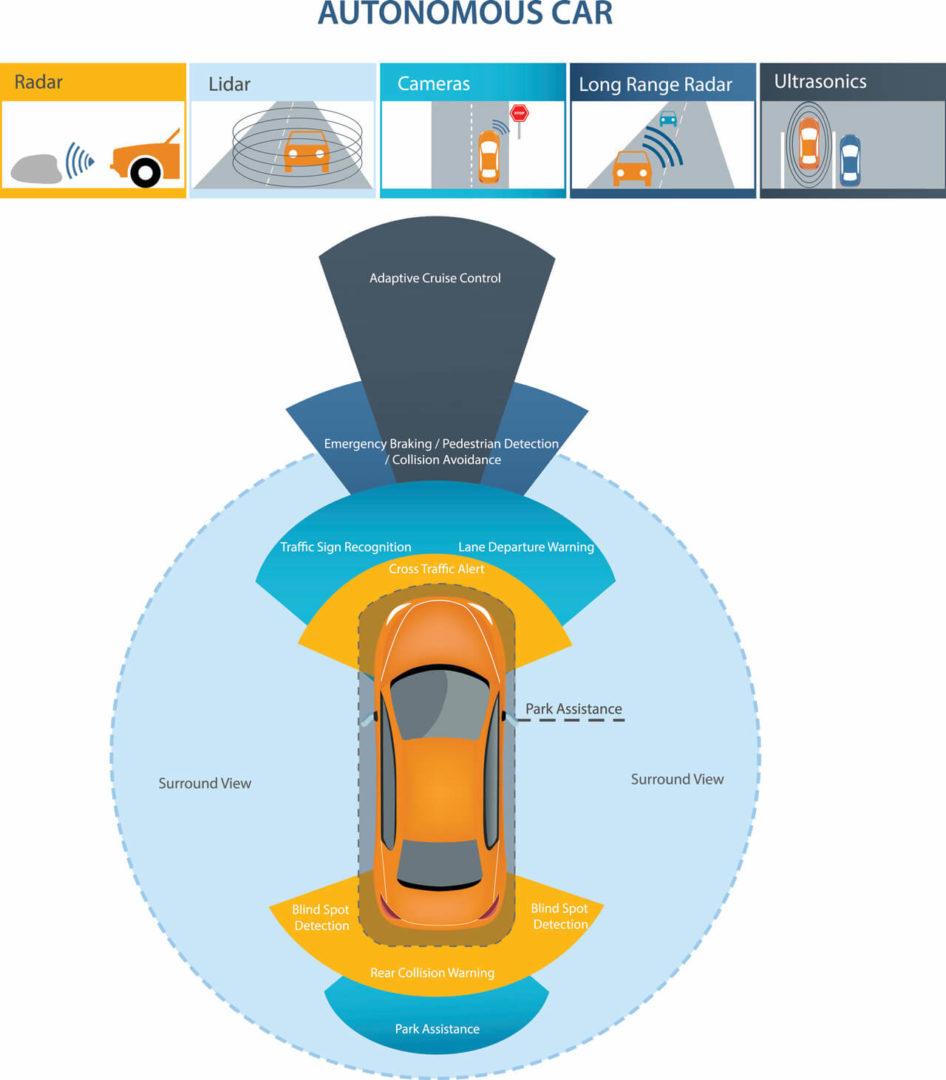
Az önvezető autóknál több rendszer hibátlan együttműködésére van szükség
Az egyik, hogy egymástól függetlenül vezérlik az olyan funkciókat, mint a fékezés, a gyorsítás és a kormányzás. A járműdinamika fizikai kölcsönhatásai miatt azonban elengedhetetlen az összes terület egységes felügyelete. Ez ugyanis az egyetlen módja annak, hogy stabilizálni lehessen a járművet például egy kitérő manőver vagy egyéb összetett szituáció esetében.
A másik probléma, hogy sok esetben a tervezés kezdeti szakaszában nem tudják figyelembe venni a rendszer későbbi korlátait. Jó példa lehet erre az úttest határainak érzékelése. Ezekben az esetekben a tesztmérnökök heurisztikus, vagyis a korábbi tapasztalatokra alapuló megoldást alkalmaznak, hogy elérjék a biztonság szempontjából kritikus paramétereket. A módszer hátránya azonban az, hogy a munka nagyon bonyolult, hosszadalmas és persze költséges, ha tényleg mindenre szeretnének felkészülni.
Másképp gondolkodunk
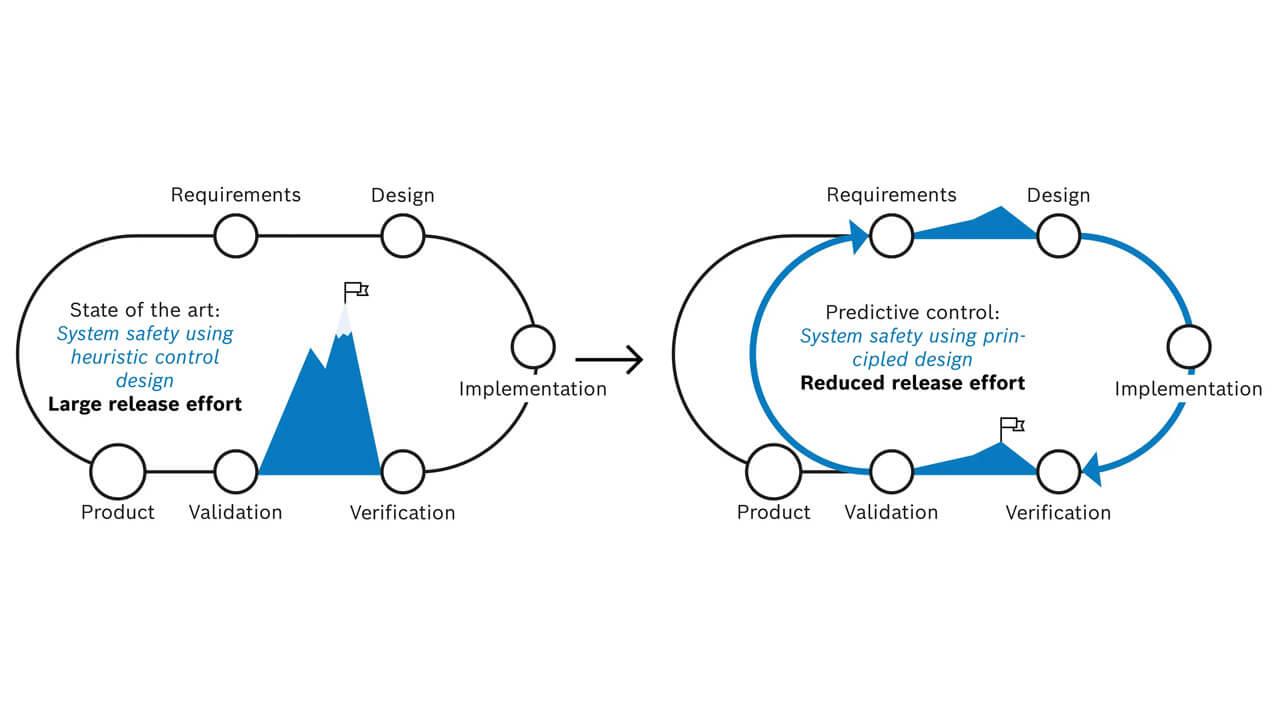
A klasszikus mozgásvezérlési struktúrák mellett a közelmúltban teret nyert a prediktív vezérlési modell (MPC). Manapság ez az elsődleges módszer a mozgásvezérlés esetében. Az alapötlet az, hogy a mérnökök megfogalmazzák, mi is a feladat és annak milyen biztonsági korlátai lehetnek. Ebben az esetben a jármű jövőbeli viselkedését egy véges horizonton jósolják meg. A kiindulópont a jármű állapotmérése. Az előrejelzés alapján kiszámítják az optimális bemeneti sorrendet, és az első elemet alkalmazzák. Így már a tervezési szakaszban figyelembe lehet venni a biztonságot, ez pedig jelentősen csökkenti az elvégzendő tesztelések számát.
Különleges jármű a különleges feladathoz
Az MPC hatékonyságát mérnökeink a MockUp járművön fejlesztik és mutatják be. Ez a MockUp egy, a fejlesztő csapat által épített különleges elektromos jármű, amely prototípus platformként szolgál az összes működtetőelem vezérléséhez. Ez magába foglalja az újonnan kifejlesztett steer-by-wire kormányrendszert, vagyis a kerekek egyedi szabályozását elektromos motorok segítségével.
MPC-vel nincs lehetetlen feladat
Az MPC előnye, hogy lehetővé teszi a kihívást jelentő feladatok modellezését. Például az útkövetést olyan kitérő manőverek esetében, amikor a járművet irányító rendszernek egyszerre kell kormányoznia, gyorsítania vagy épp fékeznie.
A videóban egy nyolcas manőver szemlélteti, milyen tökéletesen működik az MPC bonyolult feladatok teljesítése közben, akár 9 m/s²-es oldalgyorsulásokkal.
Az MPC-vel megoldható az előre meghatározott jellemzőkkel rendelkező mozgásvezérlők szintetizálása, vagyis ez a modell kiiktatja a klasszikus vezérlési megközelítések hátrányaitTovábbá, megnyitja az utat a biztonságos, nagy teljesítményű és hatékony mozgásvezérlés felé.
Biztonsági szűrők
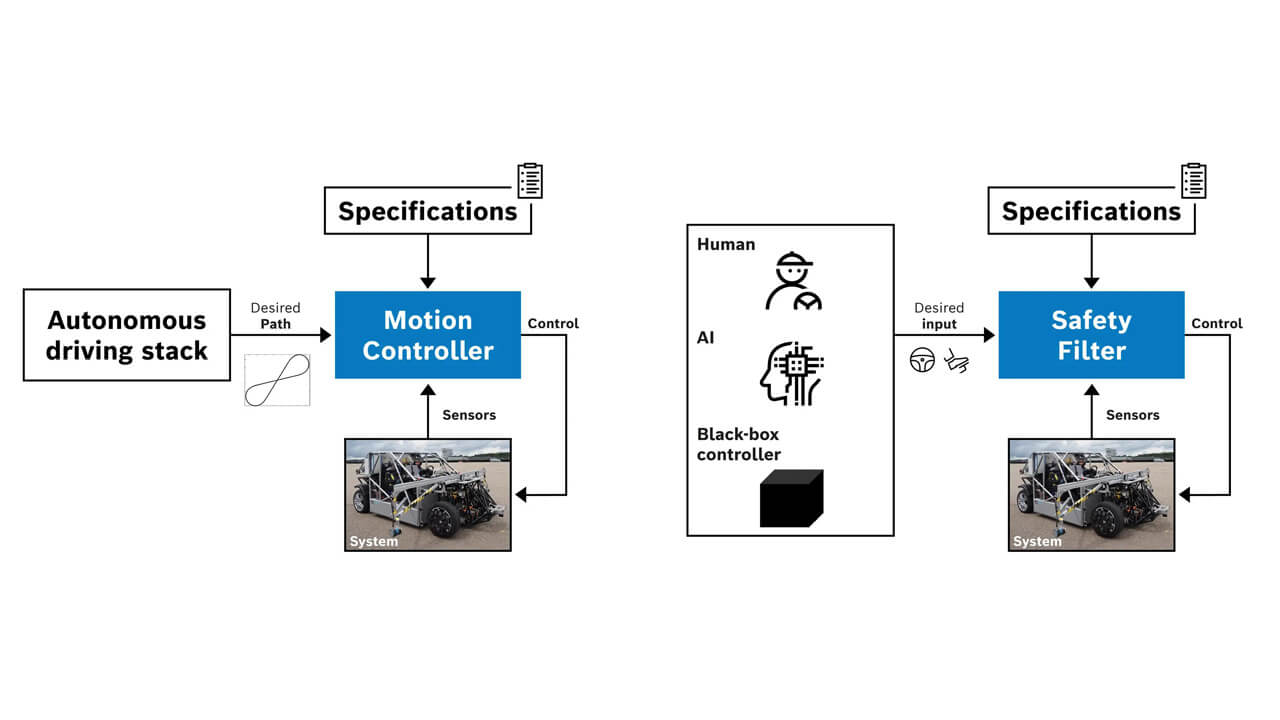
A második koncepció a prediktív biztonsági szűrők alkalmazása. Ebben az esetben kisebb módosításokkal ugyanazokat az alapvető algoritmusokat használják, mint a prediktív vezérlés esetében. Ezek lehetővé teszik a mérnökök számára, hogy a biztonsági szűrőket moduláris keretként használják bármilyen kívánt vezérlőjelhez. A jelek alatt ebben az esetben a potenciálisan nem biztonságos vezérlőszerkezeteket, vagy akár magát az emberi tényezőt értjük. Ellentétben a hagyományos vezérlési feladatokkal, például a referenciaútvonal követésével, ezek a szűrők prediktív funkcióval rendelkeznek. Ezzel tehát felmérik, hogy a kívánt vezérlési bemenetek kockázatosak lehetnek-e. Ha a válasz igen, a szűrő beavatkozik.

Modularitásuknak köszönhetően a biztonsági szűrők különféle alkalmazásokban használhatók. Például felügyelik az ember által vezetett járműveket és ha hibát észlelnek figyelmeztetnek, vagy akár korrigálnak is.
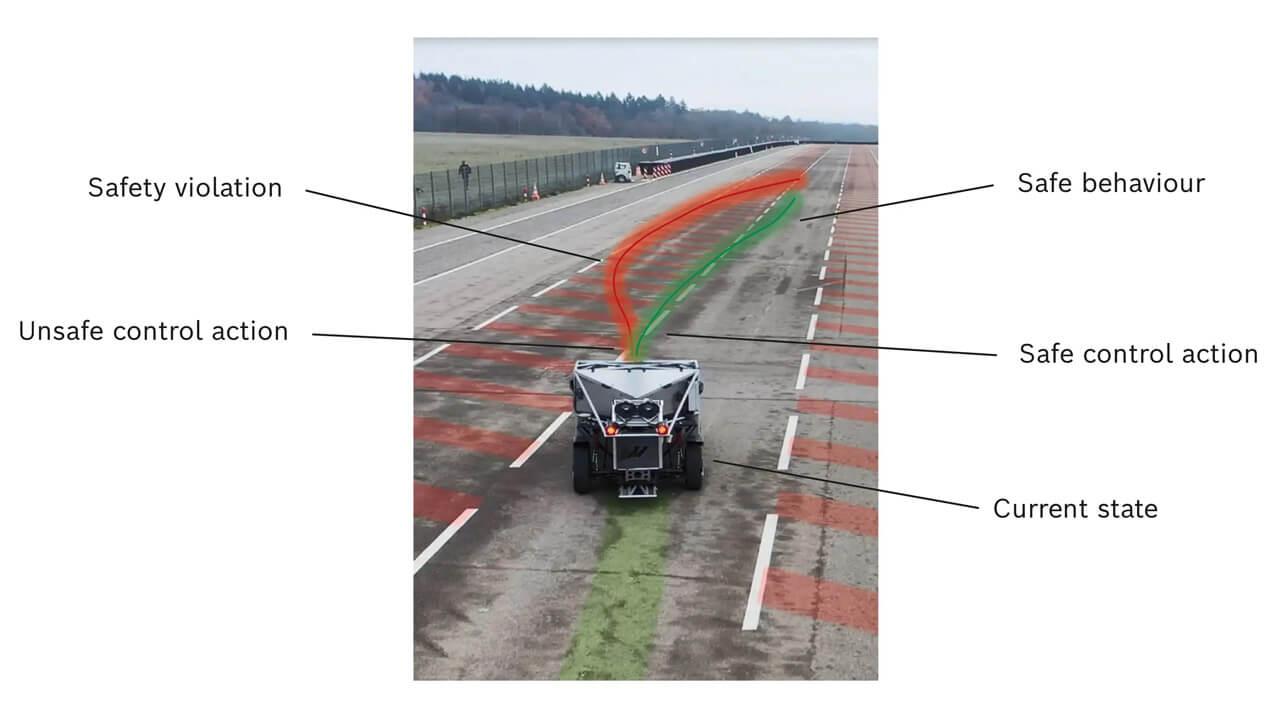
Nézzük meg, hogyan viselkedik a jármű, amikor a prediktív biztonsági szűrők beavatkoznak a kormányzásba és biztosítják, hogy a jármű a kijelölt sávon belül maradjon – jelen esetben egyenesen haladva.
Ezek a megoldások kulcsfontosságúak lehetnek az önvezető autókban, vagy akár az ember által irányított járművekben. Segítségükkel akár olyan funkciók is fejleszthetők, amelyek képesek megakadályozni például egy elájulás következtében fellépő sávelhagyást és az azzal járó balesetet is.


