Korábban mutattunk már a Bosch Magyarország IoT Blog olvasóinak olyan mesterséges intelligenciát használó fejlesztést, amelyet magyarországi kollégáink valósítottak meg. Most egy újabb érdekességet hoztunk nektek a Budapesti Fejlesztési Központ berkeiből.
Az önvezető autók kapcsán az egyik legfontosabb követelmény, hogy a jármű pontosan tudja azonosítani a környezetében lévő tárgyakat, embereket, hiszen a vezérlést végző szoftvernek tudnia kell, mi történik körülötte. Az iparági szereplők jelenleg kétfelől közelítik meg az önvezető autózást. Az egyik, hogy a vezetéstámogató rendszereket fejlesztik és emelik egyre magasabb szintre. Ezzel azt érik el, hogy egyre kevésbé lesz szükség az emberi beavatkozásra, a felhasználónak pedig van ideje megbarátkozni a rendszerrel.
A másik megközelítés. hogy az önvezető autót az alapjaitól úgy kell felépíteni, hogy ne legyen szükség emberi beavatkozásra. Míg az első módszer inkább az önvezető autók első három szintjéhez kapcsolódik, a második már inkább a négyes és ötös szinthez. Ez utóbbi elképzelhetetlen a mesterséges intelligencia nélkül, de mint látni fogjuk az előbbi megközelítéshez is jól jön majd.
Az emberi tudást veszik alapul
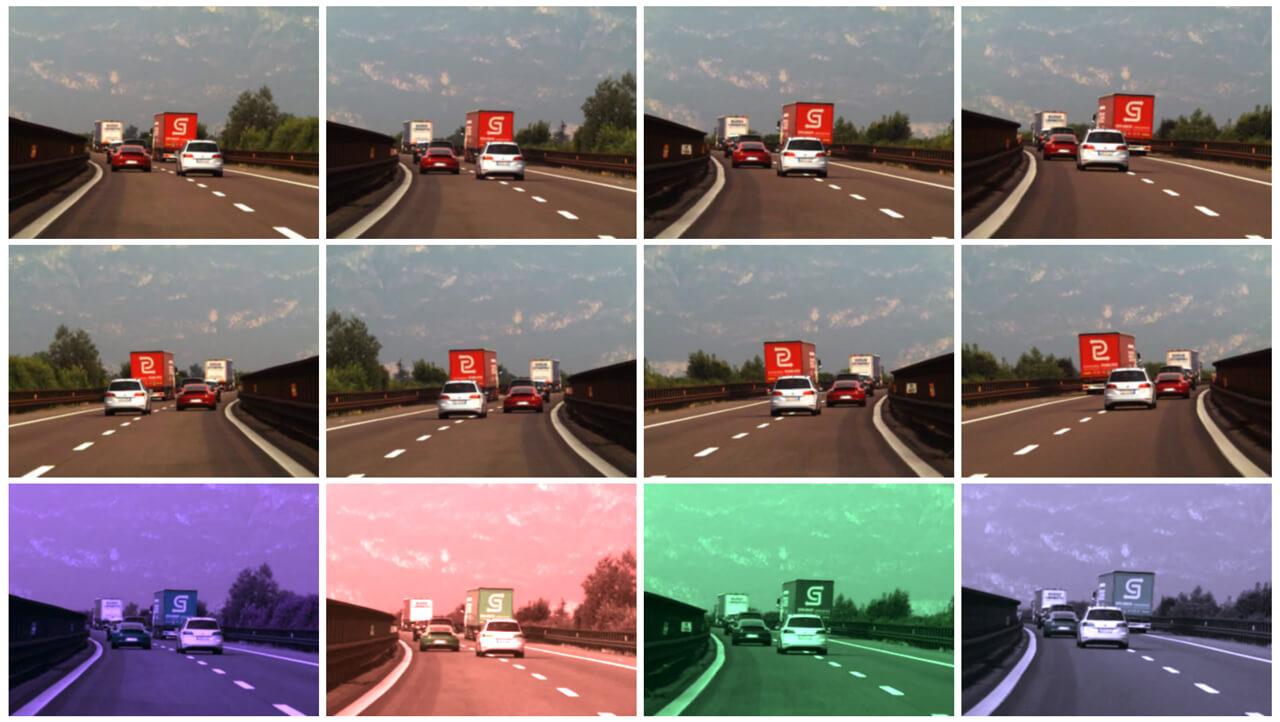
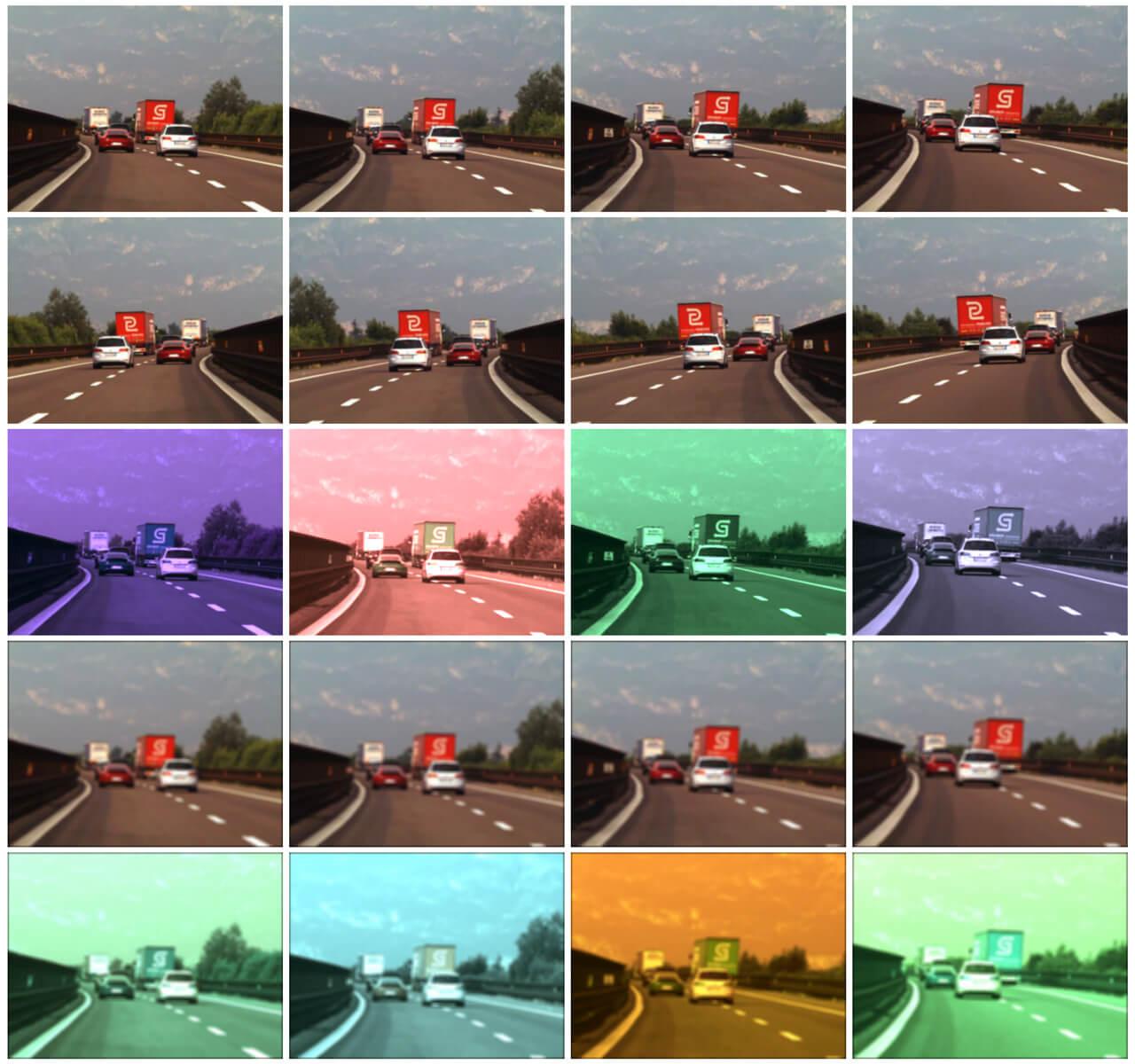
Persze jelenleg mindkét módszer esetében az emberi szaktudás a legfontosabb, hiszen a jelenleg működő rendszerek továbbfejlesztéséhez és az új alapokon nyugvó kidolgozásához is jó minőségű, megbízhatóan felcímkézett adatokra van szükség. A gyakorlatban ezt úgy kell elképzelni, hogy a jármű érzékelői, például kamerája által rögzített képkockákat kiértékeljük és azonosítjuk a rajtuk látottakat. Az embereket, a járműveket, az állatokat és a tereptárgyakat. Ezt követően ezekhez különböző viselkedési mintákat társítunk, amiket az MI a későbbiekben felhasznál a működés során. Ezt a munkát jelenleg mérnökök végzik, hiszen különböző szenzorok kombinálásával ugyan lehet alapigazságokat meghatározni, a viselkedési minták rögzítéséhez ez a módszer már kevés lehet.
Elképesztő adatmennyiség
Mondanunk sem kell, hatalmas mennyiségű adatról beszélünk – főleg a már említett videós elemzés kapcsán. Ilyen adatmennyiség mellett nem feltétlenül hatékony a mérnöki munkaidőt a címkézésre fordítani, kézenfekvő volt tehát, hogy erre új módszert keressenek kollégáink. A sokszor hosszadalmas és monoton munka kapcsán ráadásul a minőségre és a megbízhatóságra is jó hatással lehet a következőkben bemutatott új módszer. Hogy érzékeltessük milyen mennyiségű adatról van szó, érdemes egy picit megismerni a mérnökök munkáját. Jelenleg óránként átlagosan 30 gigabájtnyi adatot rögzítenek, ami azt jelenti, hogy mondjuk egy videó és radarszenzor kombinált adathalmaza elérheti az 500 gigabájtot naponta. Ezt átnézni és felcímkézni elképesztően sok munkaóra.
Kollégáink egy olyan megoldás kifejlesztésén dolgoznak, ami azt garantálja majd, hogy az emberi figyelemre csak ott legyen szükség a folyamatban, ahol komplex, bonyolult szituációkat kell elemezni. Ebben természetesen a mesterséges intelligencia használata segíthet. Mérnökeink most tulajdonképpen azon dolgoznak, hogy a kollégák tudását integrálják egy olyan szoftverbe, ami a munka jelentős részét önállóan is képes elvégezni. A projekt ötletgazdája Budapest, de természetesen egy ilyen MI nem csak itt lenne különösen érdekes, így már most több kapcsolódási pont látszik a többi fejlesztési központhoz is.
Mitől lesz ez nóvum?
A budapesti mérnökök jelenleg az adaptív sebességszabályozó (ACC) fejlesztéséhez szeretnék használni ezt a módszert. Ez ugyan egy jóval egyszerűbb feladatkör, mint az önvezető járművek teljes spektruma, mégis kellően sokrétű. Meg kell állapítani, hogy a többi közlekedő milyen mozgást hajt végre, mikor érjük utol őket, vagy épp mikor húzódnak ki elölünk. Az egyes önállóan is használható szenzorok adatait, más paraméterekkel nézik össze a kollégák, így finomítva a rendszer egészét. Itt konkrétan a radarok mellett a kameraképekre kell gondolnunk. A két forrás egymástól függetlenül is képes elvégezni a feladatot, együtt azonban sokkal nagyobb pontosságot biztosítanak a MI-nak köszönhetően.

Tulajdonképpen emberi viselkedésmintákat kell azonosítani, az önvezető rendszereknek pedig a tanulás során felhasználni
Ennek a funkciónak is valós időben kell döntéseket hoznia, ezzel együtt természetesen azok előzetes ismeretek alapján, éppen a korábbi címkézésnek köszönhetően születnek. Kitűnő példa a működési nehézségek megértésére az ACC esetében az, amikor az előtt az előttünk haladó megközelíti a sáv határát. A rendszernek fel kell ismernie a sávváltási szándékot, ugyanakkor ennek más oka is lehet, így a szándék azonosítását csak akkor nevezhetjük sikeresnek, ha úgyis alakul végül a manőver, ahogy az adatok jósolják. Ugyanez igaz egy autópálya lehajtó esetében is. Itt azt is biztosan kell azonosítani, ha elhagytuk az autópályát és például egy benzinkúthoz, vagy pihenőhelyre érkeztünk.
Hol tart most a projekt?
A fejlesztés egyik legnagyobb kihívása az emberi működés pontos meghatározása volt. Az adatok előkészítése mellett, ennek az átültetése jelentette az egyik legnagyobb kihívást. Fontos kiemelni, hogy jelenleg egy módszer kidolgozásának közepénél tartunk, így vannak már ugyan eredmények, de a fejlesztés jelenleg is tart. A Budapesti Fejlesztési Központban jelenleg négy kolléga dolgozik a projekten. A végső cél persze az, hogy magát a módszert ne csak az ACC fejlesztéséhez, hanem más, összetettebb feladatokhoz is felhasználhassuk.

A fejlesztés egyik fontos hozadéka, hogy az önvezető járművek emberközelibb reakciókat tudnak majd produkálni
Milyen kihívások bonyolítják a megvalósítást?
Az egyik legidőigényesebb feladat annak a keretrendszernek a megalkotása volt, amiben később dolgozni tudunk. Az adatok előkészítése, az időszinkronizáció megoldása, a kamerafelbontások és a kódolások egységesítése is tartogattak meglepetéseket.
A másik nehézséget maga a logika jelentette. Mivel meglévő funkcionális logikai szerint készült és címkézett adatokat használunk a tanításhoz, ez egyben azt is jelenti, hogy ez a logika a gépi tanulás szempontjából nem egyértelmű. Bizonyos szituációk csak olyan információk birtokában dönthetők el, amik nincsenek benne az adatban. Ezek esetleg applikátori leírásokban, szakértői megfontolásokban jelennek meg, amit egy ember általi címkézés akár öntudatlanul felhasznál. Azonban a gépi tanuláshoz ezeket le kell tisztázni, mi az, ami elvárható, tanítható és azt milyen formában kell előkészíteni erre.

Egy összetettebb forgalmi helyzetben mindenképpen szükség van az emberi segítségre, de az esetek döntő többségében az algoritmus megbízhatóan azonosít majd
A cél már nincs túl távol
Az alap elképzelésünk az volt, hogy az MI a lehető legjobban megközelítse az emberi címkézők hatékonyságát. Hosszabb távon persze a működési területet szeretnénk bővíteni. Majd egy évnyi munka után jelenleg ott tartunk, hogy már látszik mire és mikor használhatják ezt a módszert először a budapesti kollégák. Ez egyben azt is jelenti, hogy az idei év végén már valós körülmények között szerzett tapasztalataink is lesznek.